Акиоматика геометрииРефераты >> Математика >> Акиоматика геометрии
Тогда, если b не пересекает а, то все точки b лежат по одну сторону от а, т. е. в одной из полуплоскостей, определяемых прямой а.
Пусть А, В и С – три точки, не лежащие на одной прямой. Фигура, составленная из трёх отрезков АВ, ВС и АС называется треугольником, точки А, В и С – вершинами треугольника, а отрезки АВ, ВС и АС – сторонами треугольника.
Теорема 9. Пусть АВС – треугольник в плоскости α и а – прямая в этой плоскости, не проходящая ни через одну из точек А, В, С. Тогда если эта прямая пересекает сторону АВ, то она пересекает и притом только одну из двух других сторон ВС или АС.
Нельзя не заметить, что последняя приведённая теорема почти аналогична аксиоме Паша, входящей в систему Гильберта (см. страницу 9), и отличается от неё только тем, что в аксиоме не утверждается единственность второй пересекаемой стороны треугольника.
III. Аксиомы движения
В данной системе группа аксиом конгруэнтности заменена этой группой аксиом. Впрочем, третьи группы аксиом обоих систем в конечном итоге выполняют одну и ту же задачу, определяя разными способами одни и те же явления (группа аксиом конгруэнтности у Гильберта определяет отношения конгруэнтности напрямую, аксиомы движения – через свои следствия).
Итак, будем требовать, чтобы существовали такие отражения точек, прямых и плоскостей на точки, прямые и плоскости, именуемые движениями, удовлетворяющие следующим аксиомам.
III, 1. Каждое движение Н сохраняет отношение принадлежности.
То есть, если точка А принадлежит прямой а (плоскости α), то её образ при движении Н (обозначаемый НА) принадлежит образу прямой На (соответственно образу плоскости Нα).
III, 2. Каждое движение Н сохраняет отношение порядка на прямой.
Это означает, как, наверное, уже догадался читатель, что каждому из двух направлений на прямой а можно сопоставить такое направление на прямой На, что каждый раз, когда для точек X и Y прямой а имеет место X < Y, для соответствующих им точек прямой На имеет место HX < HY.
Из этих двух аксиом следует, что каждое движение переводит полупрямую в полупрямую, полуплоскость в полуплоскость.
III, 3. Движения образуют группу.
Это значит:
а) Сопоставление Н0 каждому элементу х (точке, прямой, плоскости) его самого есть движение. Это движение называется тождественным.
б) Если движение Н1 сопоставляет произвольному элементу х элемент y, а движение Н2 сопоставляет y элемент z, то сопоставление элементу х элемента z есть движение. Оно обозначается Н2Н1 и называется произведением движений.
в) Для каждого движения Н существует движение Н-1 такое, что
Н-1Н=Н0. Движение Н-1 будем называть обратным.
III, 4. Если при движении Н прямая h, как целое, и её начальная точка А остаются неподвижными, то все точки полупрямой h остаются неподвижными.
III, 5. Для каждой пары точек А и В существует движение Н, которе переставляет их местами: НА=В, НВ=А
III, 6. Для каждой пары лучей h, k (полупрямых), исходящих из одной точки, существует движение Н, их переставляющее: Нh=k, Hk=h.
III, 7. Пусть α и β – любые плоскости, а и b – прямые в этих плоскостях, А и В – точки на прямых а и b. Тогда существует движение, которое переводит точку А в В, заданную полупрямую прямой а, определяемую точкой А, - в заданную полупрямую прямой b, определяемую точкой В, заданную полуплоскость плоскости α, определяемую прямой а, – в заданную полуплоскость плоскости β, определяемую прямой b.
Теорема 10. Пусть α – плоскость, и а – принадлежащая ей прямая. Тогда если движение Н переводит каждую из полуплоскостей плоскости α, определяемых прямой а, в себя и оставляет неподвижными точки прямой а, то оно является тождественным.
Действительно, тождественное движение Н0 обладает указанными в теореме свойствами Н, а следовательно, по аксиоме III, 7 совпадает с ним.
Определим теперь понятие конгруэнтности. Фигуру F1 мы будем называть конгруэнтной фигуре F2, если существует движение Н, переводящее F1 в F2: HF1=F2. Из групповых свойств движения (аксиома III, 3) вытекают следующие свойства отношения конгруэнтности:
1. Каждая фигура F конгруэнтна сама себе.
Действительно, тождественное движение Н0 переводит F в F.
2. Если фигура F1 конгруэнтна F2, то фигура F2 конгруэнтна F1.
В самом деле, если Н – движение, переводящее фигуру F1 в F2, то движение Н-1 переводит фигуру F2 в фигуру F1.
3. Если фигура F1 конгруэнтна F2, а фигура F2 конгруэнтна фигуре F3, то фигура F1 конгруэнтна F3.
Действительно, если Н' – движение, переводящее фигуру F1 в F2, а Н'' – движение, переводящее фигуру F2 в F3, то движение Н''Н' переводит F1 в F3.
Впервые подобную систему предложил спустя десять после появления гильбертовой аксиоматики Фридрих Шур.
![]() Спустя ещё десять лет немецкий математик Герман Вейль (Weyl; 9.11.1885, Эльмсхорн, Шлезвиг-Гольштейн, – 8.12.1955, Цюрих) создал векторную аксиоматику геометрии. У Вейля первоначальными являются понятия «точка» и «вектор», а прямая и отрезок определяются с их помощью. Имеются аксиомы сложения векторов (означающие, что векторы образуют коммутативную группу), аксиомы умножения вектора на действительное число, аксиомы откладывания векторов (в частности, аксиома треугольника:
Спустя ещё десять лет немецкий математик Герман Вейль (Weyl; 9.11.1885, Эльмсхорн, Шлезвиг-Гольштейн, – 8.12.1955, Цюрих) создал векторную аксиоматику геометрии. У Вейля первоначальными являются понятия «точка» и «вектор», а прямая и отрезок определяются с их помощью. Имеются аксиомы сложения векторов (означающие, что векторы образуют коммутативную группу), аксиомы умножения вектора на действительное число, аксиомы откладывания векторов (в частности, аксиома треугольника: ![]() ), аксиомы скалярного произведения векторов и аксиома размерности (для планиметрии в ней утверждается: если даны три ненулевых вектора
), аксиомы скалярного произведения векторов и аксиома размерности (для планиметрии в ней утверждается: если даны три ненулевых вектора ![]() ,
, ![]() и
и ![]() , то какой-нибудь из них выражается в виде комбинации двух других:
, то какой-нибудь из них выражается в виде комбинации двух других: ![]() ). При заданных точке А и ненулевом векторе
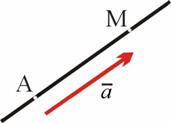
). При заданных точке А и ненулевом векторе ![]() прямая (А,
прямая (А, ![]() ) определяется как множество всех точек М, для которых вектор
) определяется как множество всех точек М, для которых вектор![]() пропорционален
пропорционален ![]() , то есть найдётся такое действительное число t, что
, то есть найдётся такое действительное число t, что ![]() (рис. 7). Далее определяются отрезки, углы, многоугольники, окружность и другие фигуры: например, расстояние между А и В – как квадратный корень из скалярного квадрата вектора
(рис. 7). Далее определяются отрезки, углы, многоугольники, окружность и другие фигуры: например, расстояние между А и В – как квадратный корень из скалярного квадрата вектора ![]() , то есть
, то есть ![]() . Теорема Пифагора легко доказывается с помощью скалярного произведения, а аксиома параллельности – с помощью векторного определения прямой и аксиомы разномерности.
. Теорема Пифагора легко доказывается с помощью скалярного произведения, а аксиома параллельности – с помощью векторного определения прямой и аксиомы разномерности.