Спутниковая система ГЛОНАССРефераты >> Авиация и космонавтика >> Спутниковая система ГЛОНАСС
Решение задачи высокоточной синхронизации бортовых шкал времен потребовало установки на спутниках высокостабильных бортовых цезиевых стандартов частоты с относительной нестабильностью 1•1013 и наземного водородного стандарта с относительной нестабильностью 1×1014, а также создания наземных средств сличения шкал с погрешностью 3 . 5 нс.
С помощью этих средств и специального математического обеспечения производится определение расхождений бортовых шкал времени с наземной шкалой и их прогнозирование для каждого спутника системы. Результат прогноза в виде поправок к спутниковым часам относительно наземных закладываются на соответствующие спутники и передаются ими в составе цифровой информации навигационного сигнала. Потребителями таким образом устанавливается единая шкала времени. Расхождение этой шкалы с наземной шкалой времени системы не превышает 15 . 20 нс.
Второй проблемой создания высокоорбитальной навигационной систем является высокоточное определение и прогнозирование параметров орбит навигационных спутников.
Достижение необходимой точности эфемерид навигационных спутнике потребовало проведения большого объема работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов, а также исключение действия на спутник в полете реактивных сил, вызванных негерметичностью двигательных установок газоотделением материалов покрытий.
Для экспериментального определения параметров геопотенциала на орбиты навигационных спутников были запущены два пассивных ИЗС "Эталон ("Космос-1989" и "Космос-2024"), предназначенных для измерения параметров их движения высокоточными квантово-оптическими измерительным средствами. Благодаря этим работам достигнутая в настоящее время точность эфемерид навигационных спутников при прогнозе на 30 ч составляет: вдоль орбиты — 20 м; по бинормали к орбите — 10 м; по высоте 5 м (СКО).
Летные испытания высокоорбитальной отечественной навигационной
системы, получившей название ГЛОНАСС, были начаты в октябре 1982 г. запуском спутника "Космос-1413" ."
В 1995 г. было завершено развертывание СРНС ГЛОНАСС до ее штатного состава (24 НС). В настоящее время предпринимаются большие усилия по поддержанию группировки.
Разработаны самолетная аппаратура АСН-16, СНС-85, АСН-21, наземная аппаратура АСН-15 (РИРВ), морская аппаратура "Шкипер" и "Репер" (РНИИ КП) и др.
Основным заказчиком и ответственным за испытания и управление системами являются Военно-космические силы РФ.
В рассматриваемый период времени в США также проведены интенсивные разработки СРНС. В 1958 г. в рамках создания первого поколения атомных ракетных подводных лодок "Полярис" была создана система "Транзит" (аналог СРНС "Цикада"), введенная в строй в 1964 г.
В начале 70-х годов начаты работы по созданию СРНС второго поколения — ОР5/"Навстар" (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута в 1993 г.
В соответствии с Постановлением Правительства РФ № 237 от 7 марта 1995 г. основными направлениями дальнейших работ являются:
· модернизация СРНС ГЛОНАСС на основе модернизированного спутника ГЛОНАСС-М с повышенным гарантийным сроком службы (пять лет«и более вместо трех в настоящее время) и более высокими техническими характеристиками, что позволит повысить надежность и точность системы в целом;
· внедрение технологии спутниковой навигации в отечественную экономику, науку и технику, а также создание нового поколения навигационной аппаратуры потребителей, станций дифференциальных поправок и контроля целостности;
· разработка и реализация концепции российской широкозонной дифференциальной подсистемы на базе инфраструктуры Военно-космических сил ее взаимодействия с ведомственными региональными и локальными дифференциальными подсистемами, находящимися как на территории России, так и за рубежом;
· развитие сотрудничества с различными международными и зарубежными организациями и фирмами в области расширения использования возможностей навигационной системы ГЛОНАСС для широкого круга потребителей;
· решение вопросов, связанных с использованием совместных навигационных полей систем ГЛОНАСС и GPS в интересах широкого круга потребителей мирового сообщества: поиск единых подходов к предоставлен услуг мировому сообществу со стороны космических навигационных систем, согласование опорных систем координат и системных шкал времени; выработка мер по недопущению использования возможностей космических навигационных систем в интересах террористических режимов и группировок.
Работы в указанных направлениях ведутся в соответствии с требованиями, выдвигаемыми различными потребителями (воздушными, морскими речными судами, наземными и космическими средствами, топогеодезическими, землеустроительными и другими службами).
Структура спутниковых радионавигационных систем
Структура, способы функционирования и требуемые характеристики подсистем СРНС во многом зависят от заданного качества навигационного обеспечения и выбранной концепции навигационных измерений. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе современной СРНС типа ГЛОНАСС и GPS функционируют три основные подсистемы (рис. 1):
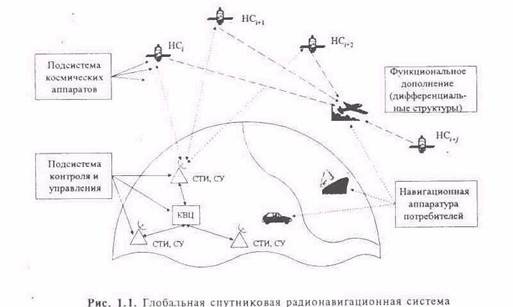
Ø космических аппаратов (ПКА), состоящая из навигационных ИСЗ (в дальнейшем ее называем сетью навигационных спутников (НС) или космическим сегментом);
Ø контроля и управления (ПКУ) (наземный командно-измерительный комплекс (КИК) или сегмент управления);
Ø аппаратура потребителей (АП) СРНС (приемоиндикаторы (ПИ) или сегмент потребителей). Разнообразие видов приемоиндикаторов СРНС обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Основной операцией, выполняемой в СРНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известными координатами.
Выбор концепции независимой навигации и использование беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности СРНС. По сравнению с зависимой навигацией, не предусматривающей процедуры вычислений ПВК в ПИ СРНС, произошло усложнение аппаратуры потребителей. Однако современные достижения в области технологий сделали возможной реализацию таких подходов при решении проблемы навигационных определений в СРНС.