Динамическое представление сигналовРефераты >> Программирование и компьютеры >> Динамическое представление сигналов
Динамическое представление сигналов.
Многие задачи радиотехники требуют специфической формы представления сигналов. Для решения этих задач необходимо располагать не только мгновенным значением сигнала, но и знать как он ведет себя во времени, знать его поведение в “прошлом” и “будущем”.
ПРИНЦИП ДИНАМИЧЕСКОГО ПРЕДСТАВЛЕНИЯ.
Данный способ получения моделей сигналов заключается в следующем:
Реальный сигнал представляется суммой некоторых элементарных сигналов, возникающих в последовательные моменты времени. Теперь, если мы устремим к нулю длительность отдельных элементарных сигналов, то в пределе получим точное представление исходного сигнала. Такой способ описания сигналов называется динамическим представлением , подчеркивая тем самым развивающийся во времени характер процесса.
На практике широкое применение нашли два способа динамического представления.
Первый способ в качестве элементарных сигналов использует ступенчатые функции, которые возникают через равные промежутки времени D . Высота каждой ступеньки равна приращению сигнала на интервале времени D. В результате сигнал может быть представлен как на рисунке 1.
рис. 1
При втором способе элементарными сигналами служат прямоугольные импульсы. Эти импульсы непосредственно примыкают друг к другу и образуют последовательность, вписанную в кривую или описанную вокруг нее . В этом случае исходный сигнал имеет вид как на рисунке 2.
рис. 2
Теперь рассмотрим свойства элементарных сигналов. Для начала : используемого для динамического представления по первому способу.
ФУНКЦИЯ ВКЛЮЧЕНИЯ.
Допустим имеется сигнал, математическая модель которого выражается системой :
ì 0, t < -x,
u(t) =í 0.5(t/x+1), -x£ t £x, (1)
î 1, t > x.
Такая функция описывает процесс перехода некоторого физического объекта из “нулевого” в “единичное” состояние.
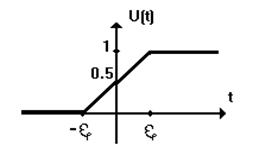
Переход совершается по линейному закону за время 2x. Теперь если параметр x устремить к нулю, то в пределе переход из одного состояния в другое будет происходить мгновенно. Такая математическая модель предельного сигнала получила название функции включения или функции Хевисайда :
ì0, t < 0,
s(t)=í0.5, t =0, (2)
î1, t >0.
В общем случае функция включения может быть смещена относительно начала отсчета времени на величину t0. Запись смещенной функции такова :
ì0, t < t0,
s(t - t0)=í0.5, t = t0, (3)
î1, t > t0.
ДИНАМИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ПРОИЗВОЛЬНОГО СИГНАЛА ПОСРЕДСТВОМ ФУНКЦИЙ ВКЛЮЧЕНИЯ.
Рассмотрим некоторый сигнал S(t), причем для определенности скажем, что S(t)=0 при t<0. Пусть {D,2D,3D, .} - последовательность моментов времени и {S1,S2,S3, .} - отвечающая им последовательность значений сигнала. Если начальное значение сигнала есть S0=S(0), то текущее значение сигнала при любом t можно приближенно представить в виде суммы ступенчатых функций :
¥
s(t)»s0s(t)+(s1-s0)s(t-D)+ .=s0s(t)+å(sk-sk-1)s(t-kD).
k=1
· Если теперь шаг D устремить к нулю. то дискретную переменную kD можно заменить непрерывной переменной t. При этом малые приращения значения сигнала превращаются в дифференциалы ds=(ds/dt)dt , и мы получаем формулу динамического представления произвольного сигнала посредством функций Хевисайда
¥
ó ds
![]() S(t)=s0s(t) + ôs(t-t) dt (4)
S(t)=s0s(t) + ôs(t-t) dt (4)
õ dt
0
Переходя ко второму способу динамического представления сигнала , когда элементами разложения служат короткие импульсы, следует ввести новое важное понятие - понятие дельта-функции.
ДЕЛЬТА - ФУНКЦИЯ .
Рассмотрим импульсный сигнал прямоугольной формы, заданный следующим образом :
1 éxxù
u(t;x) = ----- ês (t + ---- ) - s (t - ---- ) ÷ (5)
xë 2 2 û
При любом выборе параметра x площадь этого импульса
равна единице :
¥
П = òudt = 1
- ¥
Например, если u- напряжение, то П = 1 В*с.
Теперь устремим величину x к нулю. Импульс, сокращаясь по длительности, сохраняет свою площадь, поэтому его высота должна неограниченно возрастать. Предел последовательности таких функций при x ® 0 носит название дельта-функции , или функции Дирака[1] :
d(t) = lim u (t;x)
x®0
Дельта функция - интересный математический объект. Будучи равной нулю всюдю, кроме как в точке t = 0 [2] дельта-функция тем не менее обладает единичным интегралом. А вот так выглядит символическое изображение дельта-функции :
ДИНАМИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ СИГНАЛА ПОСРЕДСТВОМ ДЕЛЬТА-ФУНКЦИЙ.
Теперь вернемся к задаче описания аналогового сигнала суммой примыкающих друг к другу прямоугольных импульсов (рис. 2) . С помощью дельта-функции u (t) представимо в виде совокупности примыкающих импульсов. Если Sk - значение сигнала на k - ом отсчете, то элементарный импульс с номером k представляется как :
hk(t) = Sk[ s(t - tk) - s(t - tk- D) ] (6)
В соответствии с принципом динамического представления исходный сигнал S (t) должен рассматриваться как сумма таких элементарных слагаемых :