Нейросетевая реализация системы автономного адаптивного управленияРефераты >> Программирование и компьютеры >> Нейросетевая реализация системы автономного адаптивного управления
5.6. Реализация БОС.
Задача блока оценки состояния в конечном счете заключается в сопоставлении выходному вектору среды W некоторой оценки или числа. Фактически, речь идет о задании некоторого функционала над BN, где N - размерность выходного вектора среды W. Функционал задается как табличная функция, значения которой перечисляются в специальной секции файла спецификации. Здесь указываются типы аргумента и самой табличной функции, может быть указано значение по умолчанию, а затем перечисляются входные и соответствующие выходные значения.
[Evaluator]
set type for in BinaryVector
set type for out Integer
set default value for out=0
in=0111,out=15
in=1011,out=10
in=1101,out=5
in=1110,out=20
Пример 5.6.1. Спецификация табличной функции БОС.
Нейросетевая реализация этого блока нами не создавалась. Предполагается, что ее можно построить из двух простых подсетей, из которых одна представляет собой распознающую нейросеть, формирующую образы вектора in, а другая - комбинационную схему из нейронов, выдающую сигнал на выход с номером out в соответствии с заданным функционалом.
5.7. Реализация модели среды.
Представим среду с помощью КА Мура. Пусть КА имеет четыре состояния s1, s2, s3, s4 и представлен диаграммой Мура на рис. 5.7.1. Файл спецификации для модели среды содержит описание выходного сигнала в зависимости от состояния КА (первая часть в примере 5.7.1) и описание самого КА (вторая часть). Пятое дополнительное состояние КА initial является инициальным. Переходы указываются в виде (<исходное состояние>, <входное слово>) -> <конечное состояние>.
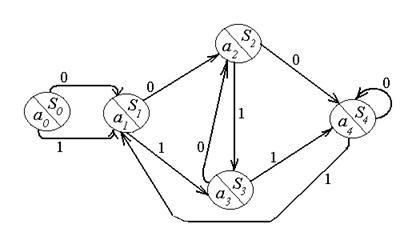
S0=initial, a0=0000, a1=0111, a2=1011, a3=1101, a4=1110
Рис. 5.7.1.
[Environment]
initial(output=1111)
s1(output=0111)
s2(output=1011)
s3(output=1101)
s4(output=1110)
[Finite State Automate]
set for word -1 synonym any
(initial,0)->s1
(initial,1)->s1
(s1,0)->s2
(s1,1)->s3
(s2,0)->s4
(s2,1)->s3
(s3,0)->s2
(s3,1)->s4
(s4,0)->s4
(s4,1)->s1
Пример 5.7.1. Спецификация модели среды.
5.8. Пример работы программы.
Результаты работы программы удобно представить временной диаграммой, где строка отображает состояние системы в момент времени ti. Будем обозначать вертикальным штрихом единичный сигнал на выходе нейрона (N) или датчика (I).
Данный пример демонстрирует способность УС находить закономерности управления и использовать их для улучшения своего состояния. Исходными данными для примера являлись спецификация сети - пример 5.3.1, спецификация БОС - пример 5.6.1, спецификация модели среды - пример 5.7.1.
Output signals graph
I1 I2 I3 I4 N2 N3 N4 N1 DecisionMaker Or Evaluator
t = 0 * * * * 1 1 0
t = 1 | | | 1 1 15
t = 2 | | | 0 0 5
t = 3 | | | 1 1 10
t = 4 | | | 1 1 5
t = 5 | | | 1 1 20
t = 6 | | | 1 1 15
t = 7 | | | 0 1 5
t = 8 | | | 0 1 20
t = 9 | | | 0 1 15
t = 10 | | | | 0 0 5
t = 11 | | | 0 1 10
t = 12 | | | | 0 1 5
t = 13 | | | 1 1 20
t = 14 | | | | 1 1 15
t = 15 | | | | 1 1 5
t = 16 | | | | 0 1 20
t = 17 | | | | 1 1 15
t = 18 | | | | 1 1 5
t = 19 | | | | 0 0 20
t = 20 | | | | 0 0 20
t = 21 | | | | 0 0 20
t = 22 | | | | 0 1 20
t = 23 | | | | 1 1 15
t = 24 | | | | 1 1 5
t = 25 | | | | 0 0 20
t = 26 | | | | 0 0 20
t = 27 | | | | 0 0 20
t = 28 | | | | 0 1 20
t = 29 | | | | 1 1 15
t = 30 | | | | 1 1 5
t = 31 | | | | 0 0 20
t = 32 | | | | 0 1 20
t = 33 | | | | 1 1 15
t = 34 | | | | 1 1 5
t = 35 | | | | 0 0 20
t = 36 | | | | 0 0 20
t = 37 | | | | 0 0 20
t = 38 | | | | 0 1 20
t = 39 | | | | 1 1 15
t = 40 | | | | 1 1 5
.
Calculation time statistics
Number of net nodes = 11
Time interval length = 600
Calculation time = 1.582 secs
Mean time of calculating one node output = 0.24 ms
Knowledge base statistics
N3 -> N4 with action 1 with probability 141 / 141 = 1
N4 -> N1 with action 0 with probability 141 / 304 = 0.464
N1 -> N3 with action 1 with probability 141 / 141 = 1
Пример 5.8.1. Результат работы программы.
На диаграмме выведены выходные сигналы входных элементов (датчиков) I1, I2, I3, I4, нейронов N1, N2, N3, N4, БПР (DecisionMaker), БОС (Evaluator) и внутреннего элемента среды (Or), на который подаются сигналы от БПР и стохастического источника, а выход соединен с входом модели КА Мура. Множество возможных воздействий УС на среду состоит из двух элементов, обозначенных как 0 и 1. Из примеров 5.6.1 и 5.7.1 видно, что состоянием модели среды с наивысшей оценкой является s4. Из диаграммы 5.8.1 можно сделать вывод, что УС нашла закономерности управления, достаточные для удержания ОУ в состоянии s4 (t > 18), но в результате действия стохастического источника после некоторого времени пребывания в s4 ОУ перескакивает из этого состояния в s1, откуда УС снова переводит его в состояние s4.
Работу системы проиллюстрируем на рис. 5.8.1. В систему входят модель среды, состоящей из КА и Истока, и УС, состоящей из блоков ФРО, БОС, БЗ, БПР.
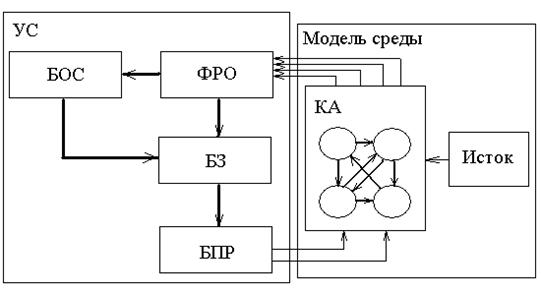
Рис. 5.8.1.
В конце примера выведена информация о состоянии БЗ, содержащей знания, эмпирически найденные УС к моменту окончания работы программы.
5.9. Перспективы развития СПИНС.
Кроме намеченных в разделе 5.1 направлений развития системы, а именно создание конструктора сетей с графическим интерфейсом, расширение языка спецификации сетей и др., необходима доработка и разработка нейросетевых реализаций БЗ и БПР, разработка методов создания реальных приложений по полученным с помощью СПИНС спецификациям сетей. Привлекательным является также создание трехмерного визуализатора БЗ. Визуализация БЗ основана на введении топологии в конечном пространстве образов базы знаний ![]() (определение 4.5) посредством отображения F и Y в R, таким образом, области в B отобразятся в области в
(определение 4.5) посредством отображения F и Y в R, таким образом, области в B отобразятся в области в ![]() .
.
Если образ ![]() ,
, ![]() сформирован, то он отображается точкой цвета, соответствующего сформировавшейся оценке образа
сформирован, то он отображается точкой цвета, соответствующего сформировавшейся оценке образа ![]() . При этом в пространстве обозначатся некоторые цветные области (рис. 5.9.1), иллюстрирующие закон управления.
. При этом в пространстве обозначатся некоторые цветные области (рис. 5.9.1), иллюстрирующие закон управления.
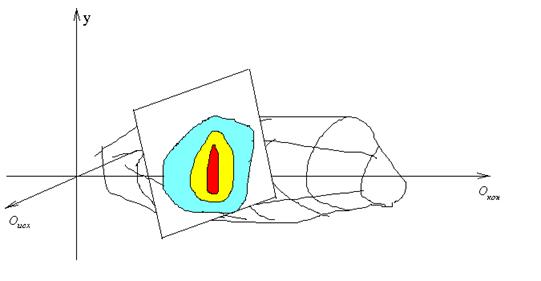
Рис. 5.9.1.
Заключение.
Основные результаты дипломной работы состоят в следующем:
1. Разработана концепция и реализовано ядро программной системы СПИНС для построения и исследования нейросетевой реализации прототипов управляющих систем, построенных по методу автономного адаптивного управления, созданного в отделе имитационных систем Института Системного Программирования РАН.