Мореходная астрономияРефераты >> Авиация и космонавтика >> Мореходная астрономия
43. Пространственная прямоугольная система координат. Взаимосвязь местоположения и скорости судна от расстояний до НИСЗ
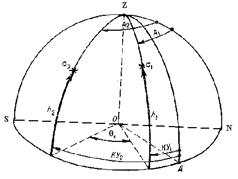
В отличие от обычных астрономических обсерваций, где измеряются только направления на светила относительно оси вращения Земли и отвесной линии, при обсервациях по СНС учитываются закономерности изменения расстояния между спутниками и судном при их взаимном перемещении в пространстве. Поэтому при обсервациях по СНС применяют пространственную систему координат XYZ, участвующую во вращении Земли. Начало этой системы координат принимается в центре Земли О, ось X лежит в плоскости гринвичского меридиана, а ось Z направлена к северному полюсу мира. Для получения обсервованных координат места по наклонной дальности D или по скорости ее изменения Vd необходимо математически связать:
- пространственные прямоугольные координаты НКАσ (х0, у0, z0) и проекции вектора скорости ИСЗ ![]() σ (Vx, Vy, Vz);
σ (Vx, Vy, Vz);
- пространственные прямоугольные координаты М (xм, ум, zм) и проекции вектора скорости судна![]() (vx, vy, vz).
(vx, vy, vz).
Исходными данными при этом будут служить:
- для НКА - геоцентрический радиус-вектор ![]() = Rσ + hп и скорость Vσ, а также эфемеридная информация II вида, позволяющая вычислить значения направляющих косинусов углов ХОσ, YOσ, ZOσ;
= Rσ + hп и скорость Vσ, а также эфемеридная информация II вида, позволяющая вычислить значения направляющих косинусов углов ХОσ, YOσ, ZOσ;
- для судовой навигационной аппаратуры - геоцентрический радиус-вектор приемной антенны ![]() =Rм + hант, где hант - высота антенны над уровнем моря; скорость V и путевой угол судна ПУ, геоцентрические координаты судна φ' и λ. Географическая широта φ и геоцентрическая широта φ' связаны известным выражением: φ = arctg [tg φ' (1 - е2)-1] при наибольшей разнице φ - φ'=11,5' на широте φ =45°.
=Rм + hант, где hант - высота антенны над уровнем моря; скорость V и путевой угол судна ПУ, геоцентрические координаты судна φ' и λ. Географическая широта φ и геоцентрическая широта φ' связаны известным выражением: φ = arctg [tg φ' (1 - е2)-1] при наибольшей разнице φ - φ'=11,5' на широте φ =45°.
44. Методы получения навигационных параметров, используемые в в СНС
Определение местоположения путём измерения расстояний до объекта от точек с известными координатами — спутников. Расстояние вычисляется по времени задержки распространения сигнала от посылки его спутником до приёма антенной GPS-приёмника. для определения 3d координат GPS-приёмнику нужно знать расстояние до трёх спутников и время GPS системы. благодаря эффекту Доплера частота принимаемого сигнала увеличивается при приближении спутника и уменьшается при его отдалении. точно зная положение спутника, можно определить собственную скорость и координаты.
Среднестатистические значения погрешностей измерения навигационных параметров среднеорбитных СНС.
|
Составляющие погрешности |
Псевдодальности (м) |
Псевдоскорости (см/с) | ||
|
Грубый канал |
Точны канал |
Грубы канал |
Точны канал | |
|
Эфемеридная погрешность |
0,6-1,5 |
0,6-1,5 |
- |
- |
|
Ионосферная погрешность |
5,0-20,0 |
0,01-0,05 |
5,0 |
0,01 |
|
Тропосферная погрешность |
1,0-2,0 |
1,0-2,0 |
0,1 |
0,1 |
|
Инструментальная погрешность |
1,0-1,2 |
0,35 |
20 |
20 |
|
Погрешность взаимной синхронизации определителей времени |
0,6-2,7 |
0,6-2,7 |
- |
- |
45. Получение места судна по измеренным азимутам светил
Азимутальная линия положения. Измеренному азимуту А соответствует на земном шаре изолиния РnМδ, называемая изоазимутой (рис. 6.7). Текущие координаты места судна М (φ, λ), координаты географического места светила σ (tгр, δ) и азимут А связывает уравнение изоазимуты:
ctg A = cos φ tg δ cosec tм - sin φ ctg tм. (6.11)
Малый отрезок изоазимуты в районе счислимого места С (рис. 6.8), совпадающий с прямой линией 1-1, является азимутальной линией положения (АЛП), уравнение которой имеет вид: cos τАΔ φ + sin τАΔω = (А-Ас)/gА, (6.12)
где - τА - угол, определяющий направление градиента азимута в счислимом месте; - Ас - счислимый азимут; - gA - модуль градиента азимута, выражающийся формулой:
![]() (6.13)
(6.13)
Для получения элементов АЛП необходимо 1. Измерить азимут светила и исправить его поправкой системы курсоуказания ΔK и инструментальной поправкой визирующего устройства s. Вычисляют Ас и hc Вычисляют элементы nА и τА азимутальной линии положения
46. Получение места судна по измеренным разностям азимутов светил. Разностно-азимутальная линии положения
Разность азимутов двух светил может быть измерена непосредственно или найдена косвенным путем посредством измерения в один и тот же момент времени пеленгов или курсовых углов этих светил. При неодновременных измерениях пеленгов или КУ потребуется их приведение не только к одному месту, но и к одному моменту измерений, что может значительно осложнить решение. Разность азимутов ΔП=Θ, являясь астронавигационным параметром, обладает важным достоинством: в ней исключается погрешность поправки курсоуказания или погрешность установки измерительного устройства в диаметральной плоскости судна ОД (рис. 6.9), а также другие повторяющиеся погрешности измерений и исправления азимутов. Разность азимутов θ вычисляется по формуле:
Θ=А2 - А1=ИП2 - ИП1 , или Θ=КУ2 - КУ1. (6.20)
Разность азимутов Θ является углом на сфере между вертикалами светил, которому соответствует сферическая изогона - изолиния, аналогичная изоазимуте (рис. 6.7), если принять одно из светил находящимся над точкой Рn.