Соответствие между молекулами и группами симметрии
Каждая молекула может быть отнесена к одной из точечных групп 14 типов. Эти точечные группы состоят из строго определенных операций симметрии и никакие другие точечные группы невозможны. Однако, сопоставляя молекулу с одной из перечисленных выше групп симметрии, следует тщательно выбирать более полную группу, к которой принадлежит молекула. Неполная группа допускает асимметрию в потенциальном поле вокруг атома, что из физических соображений часто не бывает. Например, плоская молекула ZX3 вряд ли обладает симметрией C3, ибо тогда распределение потенциала могло бы быть такое как на рисунке, хотя совершенно ясно, что оно невозможно физически. Ее симметрия и не D3 (C3, 3C2), ибо в этом случае распределение потенциала могло бы быть пространственно в виде трехлопастного винта. Полная симметрия плоской молекулы типа ZX3 - D3h (C3, 3C2, 3sv, sh).
После установления полной симметрии молекулы можно классифицировать атомы на эквивалентные. Эквивалентными атомами называются атомы, которые переходят друг в друга при всех преобразованиях симметрии. Все эквивалентные атомы, разумеется, одинаковы в химическом отношении. Обратное, конечно, не справедливо. Число эквивалентных атомов не может превышать полный порядок группы (т.е. число операций), однако, может быть меньше. Для любого вида эквивалентных атомов совокупность операций, оставляющих данный атом неизменным, образует подгруппу данной группы G. В частном случае такая подгруппа может либо совпадать с подгруппой G, либо состоять лишь из одного элемента E (C1). Подгруппа атомов X в молекуле ZX3 есть C2v (Е, C2, sv, sh).
Поскольку мы идентифицировали элементы группы симметрии с некоторыми определенными геометрическими операциями, мы постараемся найти для них аналитические выражения, т.е. представления. Сначала мы обсудим геометрический смысл представлений и укажем до какой степени геометрическая интуиция может служить для их нахождения. Вместо действительного указания операций группы мы можем, очевидно, указать численное значение некоторой величины, связанной с симметричной фигурой для каждой из операций. Например, в циклической группе Cn мы можем, начиная с произвольно выбранной точки, обозначить каждую операцию Cnp величиной соответствующего угла вращения
|
E |
Cn1 |
Cn2 |
Cn3 |
Cnk |
Cnn |
|
0 |
1*2p/n |
2*2p/n |
3*2p/n |
k*2p/n |
n*2p/n |
Недостатком такого "представления" является то, что соответствующая операция с углами не является умножением, а представляет собой сложение с последующим взятием остатка от целого кратного 2p.
Например, 2*2p/5+4*2p/5=12p/5 = 2p+2p/5.
Но одним из требований для пригодных представлений является то, чтобы они имели, как и их операции или обычное, либо матричное умножение. Так в примере с Cn можно вместо значения угла выбрать комплексную координату на единичном круге.
|
Е |
Cn2 |
Cn3 |
Cnk |
……. |
Cnn |
|
ехp (2pi /n) |
ехp (2pi /n) 2 |
ехp (2pi /n) 3 |
ехp (2pi /n) k |
…. |
ехp (2pi /n) n |
Тогда для последовательных преобразований мы будем иметь причем это число будет уже удовлетворительным представителем группы. В более общем случае можно было бы рассматривать три координаты X,Y,Z точки на единичной сфере, и смотреть, что с ними происходит при различных преобразованиях группы. Если операция R группы переводит точку М (X,Y,Z) в положение M¢ (X¢,Y¢,Z¢), то это преобразование координат может быть записано:
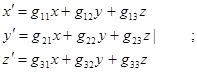

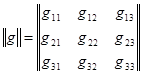
Тогда набору из 9 чисел g11, g12, ., g33 могут быть сопоставлены операции G в качестве ее представления. Однако, единственный путь ввести для этих чисел простые правила умножения - это взять их в виде матрицы:
Так, в частности, операция отражения в плоскости sz, операция идентичности Е и инверсии I в начале координат будут иметь вид:

Последовательное применение нескольких операций будет описываться матричным произведением исходных представлений. Действительно, пусть преобразование А дает X¢=АX. Последующее преобразование B дает: X¢¢=BX¢, или через X: X¢¢=BAX, X¢¢=CX, где C=BA. Преобразование с коэффициентами C является произведением двух преобразований и осуществляет таким образом представление операции C=AB.
В частности, зеркально-поворотная ось четвертого порядка S41=C41*Cn2 может быть представлена матрицей:
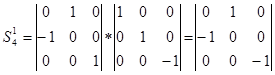
Этот же результат можно было получить, рассматривая непосредственное изменение координат при операции sh и последующей операции C41.
Таблица 2
Таблица умножения группы C4v.
|
E |
C41 |
C43 |
C42 |
sx |
sy |
sd1 |
sd2 |
|
C43 |
E |
C42 |
C41 |
sd1 |
sd2 |
sy |
sx |
|
C41 |
C42 |
E |
C43 |
sd2 |
sd1 |
sx |
sy |
|
C42 |
C43 |
C41 |
E |
sy |
sx |
sd2 |
sd1 |
|
sx |
sd1 |
sd2 |
sy |
E |
C42 |
C41 |
C43 |
|
sy |
sd2 |
sd1 |
sx |
C42 |
E |
C43 |
C41 |
|
sd1 |
sy |
sx |
sd2 |
C43 |
C41 |
E |
C42 |
|
sd2 |
sx |
sy |
sd1 |
C41 |
C43 |
C42 |
E |