Обзор методов и способов измерения физико-механических параметров рыбы
Установки для исследования кинетических коэффициентов трения рыб.
Под кинетическим коэффициентом трения рыб понимается коэффициент трения скольжения рыб по соответствующему материалу.
В рыбообрабатывающих и транспортирующих машинах рыба перемещается относительно рабочих органов и поэтому при проектировании новых, а также при исследовании существующих машин для определения оптимальных параметров необходимо располагать данными о силах трения скольжения.
Конструкция экспериментальной установки должна обеспечивать возможность определения коэффициента трения скольжения между рыбой и соответствующей поверхностью. В связи с тем, что сила трения зависит от скорости, коэффициент трения скольжения будем называть кинетическим коэффициентом Трения. Под кинетическим коэффициентом трения понимают отношений силы трения скольжения при установившейся скорости движения к силе нормального давления рыбы на плоскость.
Кинетические коэффициенты трения рыб можно исследовать на специальных установках, описанных ниже. Первые две аналогичны установкам, применяемым для исследования трения покоя. На этих установках можно исследовать кинетические коэффициенты трения при малых скоростях скольжения. При скоростях скольжения свыше 0,1 м/с выполнить соответствующие исследования невозможно, поскольку длина плоскости скольжения практически не превышает 1 м и за столь короткий период времени не успевает сформироваться фрикционный контакт, а, следовательно, сила трения скольжения будет величиной переменной.
При скоростях скольжения свыше 0,1 м/с исследования силы трения скольжения проводились на установке с вращающимся диском и установке «Экспресс».
Установка с вращающимся диском. Схема установки представлена на рис. 2. Установка состоит из электродвигателя постоянного тока 1, который через приводную станцию 2 вращает диск 3. Приводная станция состоит из червячного цилиндрического редуктора и ременной передачи со сменными шкивами. На кронштейне 4 консольно закреплена пружинная балка 5 с двумя наклонными тензодатчиками 6. Гибкая нить 7 крепится к пружинной балке 5, огибает направляющий блок 8 и другим концом крепится к рыбе. Диаметр сменных дисков 3 равен 1 м. Они могут изготовляться из различных материалов (нержавеющая сталь, оргстекло, винипласт, прорезиненная лента и т. д.).
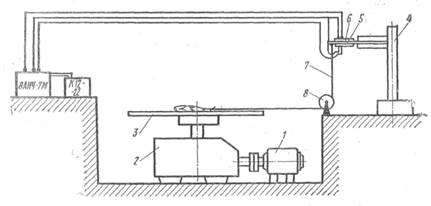
Рис. 2. Установка с вращающимся диском для исследования кинетических коэффициентов трения.
В процессе проведения эксперимента сила трения между рыбой, находящейся в неподвижном состоянии, и материалом вращающегося диска передается через гибкую нить на пружинную балку с тензодатчиками, далее сигнал поступает на тензостанцию и записывается шлейфовым осциллографом. Скорость вращения диска регулируется путем изменения напряжения в обмотке возбуждения двигателя и сменных шкивов ременной передачи. На установках такого типа можно исследовать силы трения при скоростях скольжения от 0,1 до 2 м/с. Преимущество установки этого типа заключается в том, что при сравнительно небольших габаритах они позволяют исследовать силу трения между рыбой и соответствующим материалом в широком диапазоне скоростей скольжения. Однако установка, имеет и недостатки. Рыба, уложенная в процессе эксперимента на вращающийся диск, находится в неподвижном состоянии, поэтому не подвержена воздействию центробежных сил. Однако траектория относительного перемещения отдельных точек тела рыбы состоит из окружностей разного диаметра, и, по-видимому, элементарные силы трения будут в различных точках иметь разные направления. В связи с этим необходимо исследовать погрешности, допускаемые при замере суммарной величины силы трения.
Установка «Экспресс». Разработана С. И. Брилем и состоит из движущейся наклонной плоскости, к которой крепится соответствующий материал 1 (рис. 3). Исследуемый образец (или рыба) является звеном параллелограммного четырехзвенного механизма ABCD. Звенья механизма 3 и 4 являются гибкими нитями. Плоскость движения механизма параллельна плоскости 1. При исследовании трущейся пары плоскость 1 перемещается в направлении х—х с постоянной скоростью υ. Между плоскостью 1 и исследуемым образцом 2 возникает сила трения, увлекающая за собой образец 2.
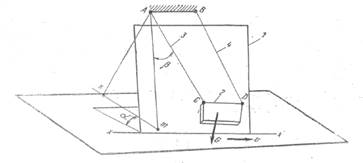
Рис. 3. Схема установки «Экспресс»
При этом гибкие звенья четырехзвенного параллелограмма отклоняются от плоскости АтК на угол β. Сила тяжести образца G стремится вернуть образец 2 в исходное положение. В некотором положении нитей наступает равновесие механизма. Угол отклонения нитей в этом положении β пропорционален коэффициенту трения. Плоскость АтК перпендикулярна плоскости KmX и параллельна силе тяжести G. Силы, действующие в установке, изображены на рис. 4.
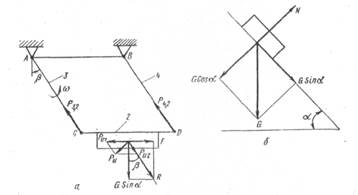
Рис. 4. Силы, действующие в установке «Экспресс»:
а – фронтальная плоскость; б – нормальная плоскость
КОЭФФИЦИЕНТЫ ТРЕНИЯ РЫБ
Коэффициенты трения покоя рыб.
Опыты по определению коэффициентов трения покоя различных видов рыб по поверхностям из различных материалов проводят на специальных экспериментальных установках.
Сила трения между рыбой и различными поверхностями де формировала балку с тензодатчиками и через тензоусилитель записывается шлейфовым осциллографом на фотобумагу.
По осциллограмме процесса трения определяют силу трения покоя, т. е. минимальную силу, необходимую для сдвига рыбы с места. Чем больше продолжительность неподвижного контакта, тем больше сила трения. Коэффициент трения покоя определяют как частное от деления силы трения на силу нормального давления (силу тяжести при горизонтальной плоскости):
![]() (1)
(1)
Так как коэффициент трения покоя зависит от нормального давления, т. е. от силы тяжести рыбы, поэтому при проведении экспериментов подбирают рыб, незначительно различающихся по массе. Однако даже при одинаковой массе рыб коэффициенты трения покоя различаются. Для достоверности результатов определяют необходимое число экспериментов по формуле
![]() (2)
(2)
где t(p) — доверительный интервал; ε — доверительная оценка погрешности; σ — среднее квадратичное отклонение.
|
Таблица 1 | |||
| Коэффициент трения fi | Среднее значение коэффициента трения fср | Δf = fср- fi | Δfi2 |
| 0.22 | – | +0.05 | 0.0025 |
| 0.23 | – | +0.04 | 0.0016 |
| 0.34 | – | –0.07 | 0.049 |
| 0.26 | 0.27 | +0.01 | 0.0001 |
| 0.31 | – | –0.05 | 0.0025 |