Система автоматического регулированияРефераты >> Технология >> Система автоматического регулирования
Рис. 16 - Расположение корней характеристического уравнения
5. Исследование переходного процесса и определение основных
показателей качества регулирования
В качестве модели системы можно использовать блок с передаточной функцией 3-го порядка.
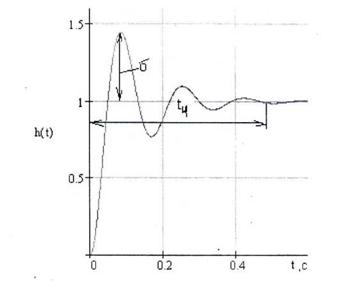
Реакция модели имеет следующие параметры:
перерегулирование σ = 40%
время переходного процесса tη = 0,45 с,
количество колебаний за время переходного процесса - 2,5.
6. Исследование переходного процесса и определение параметров
системы с ПИД-регулятором
Рассмотрим принцип работы ПИД-регулятора.
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Однако при использовании только пропорционального регулятора значение регулируемой величины не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая.
Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от установки, тем сильнее противодействие, создаваемое дифференциальной составляющей.
Выходной сигнал регулятора равен
|
|
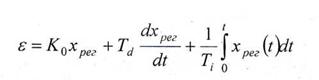
Параметры ПИД-регулятора определяются с помощью ЭВМ при использовании ППП MathCAD.
Параметры регулятора:
|
|
7. Анализ частотных характеристик замкнутой САР
Рис. 19 - Схема замкнутой системы с ПИД-регулятором
Передаточная функция замкнутой системы имеет вид

Переходная характеристика замкнутой системы приведена ниже.
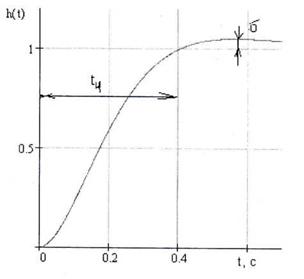
Рис. 20 - Переходная характеристика замкнутой системы
Ошибка регулирования равна 0,05, время регулирования 0,4 с, перерегулирование равно 4,6%.
Амплитудно-частотная характеристика замкнутой системы с регулятором показана на рисунке 21.
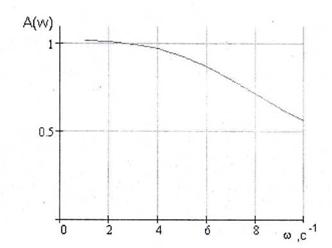
Рис. 21 - Амплитудно-частотная характеристика замкнутой системы с регулятором
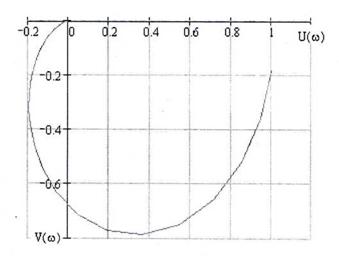
Рис. 22 - АФЧХ системы
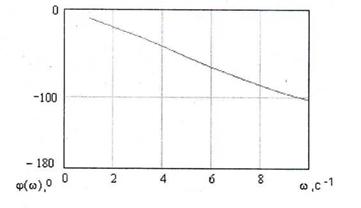
Рис. 23 - ФЧХ системы
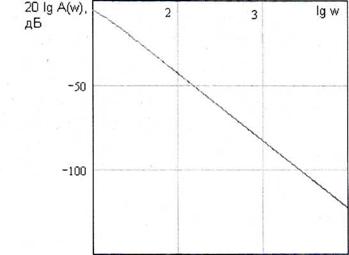
Рис. 24. ЛАЧХ системы
8. Исследование частотных свойств системы и определение основных показателей качества регулирования
Анализ частотных характеристик позволяет сделать вывод, что система обладает свойствами низкочастотного фильтра.
Найдем корни характеристического уравнения
|
|
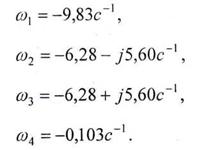
Время переходного процесса
Колебательность системы
|
|
9. Сравнение динамических свойств и показателей качества регулирования исходной системы и системы с ПИД-регулятором
Как уже отмечалось, перерегулирование системы без ПИД-регулятора равно 40%, а перерегулирование системы с ПИД-регулятором равно 5%.
Время переходного процесса в системе без ПИД-регулятора равно 0,45 с, а время переходного процесса в системе с ПИД-регулятором равно 0,4 с.
Количество колебаний за время переходного процесса в системе с ПИД- регулятором равно 2,5, а в системе с ПИД-регулятором переходный процесс затухает за одно колебание.
Таким образом, с помощью ПИД-регулятора удалось значительно улучшить показатели переходного процесса.
ЗАКЛЮЧЕНИЕ
Теория автоматического управления непрерывно развивается. Разрабатываются новые подходы к решению традиционных задач, создаются новые направления в данной области науки. Если на начальной стадии создания теории автоматического управления, в 40—50-х годах прошлого века, большее внимание уделялось частотным методам, то в дальнейшем в основном развивались методы, основанные на пространстве состояний.