Оборудование производства ИУРефераты >> Технология >> Оборудование производства ИУ
tпд = 1,57Lпд / Vмах = ![]() (5)
(5)
tотв = 1,5Lотв / Vмах = ![]() (6)
(6)
где Lпд,Lотв– соответственно перемещение инструмента при подводе к детали и отводе инструмента в исходное положение, м;
Vmax, аmax– максимальные скорость и ускорение на участках подвода и отвода, м/с, м/с2.
Для обеспечения максимальной синхронности работы приводных механизмов технологического и транспортного движений следует соблюдать неравенства tпд£ t1+ t2, tотв£ t3+ t4:
tпд = 0,157 с
tотв = 0,173 с
TT = 0,48 c
Tk = 0.46 c
После определения интервалов кинематического итехнологического циклов и проверки соблюдения неравенств определяем общее число позиций ротора
uр= Пт× Тк / 60£ 1,33× Пт× Тт / 60
uр = 7.66
Полученное число позиций технологического ротора uр округляем в большую сторону и принимаем соответственно параметрическому ряду 4, 5, 6, 8, 9, 10, 12, 16, 18, 20, 24 (см. таблицу 3 [1])
Принимаем количество инструментальных блоков uр = 8
Число инструментальных блоков, находящихсяодновременно врабочей зоне ротора, определяемпо формуле:
uo= Пт*tр / 60
uo= 1,33
D = 120 мм
1.4. Расчет конструктивных параметров роторов
Радиус начальнойокружности технологического ротора:
Rp= (1/ 2p)*uр*hp (7)
Rp= 60 мм
Величину радиуса Rр проверяем с учетом конструктивных размеров вала ротора и инструментальных блоков (см. рис.2):
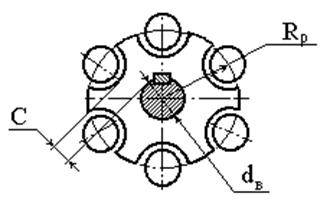
Рис. 2. Схема к расчету свободного пространства технологического ротора
Rp![]() 0,5(dв+ Dбл) + с
0,5(dв+ Dбл) + с
В первом приближении принимаем:
dв = 0,5 Dбл: с = 30 .40 мм
dв= 18 мм
60![]() 57, условие выполняется
57, условие выполняется
Частота вращения ротора (об/мин):
np= Пт / uр
np = 125 об/мин
Окружная (транспортная) скорость:
Vтр = Пт*hp /60 = p* np* Rp/30
Vтр = 78,5 м/мин
Для удобства компоновки и обеспечения установленной окружной скорости роторов рекомендуется принимать диаметры начальных окружностей зубчатых колес привода транспортного движения равными диаметрам начальных окружностей роторов. Поэтому полученное значение диаметра начальной окружности ротора Dр уточняем с учетом параметров зубчатого зацепления
Конструктивные параметры транспортных роторов определяем аналогично технологическим. С целью удобства размещения технологических роторов, обеспечения доступа к рабочей зоне, простоты ремонта и обслуживания число позиций и диаметры транспортных роторов рекомендуется брать больше технологических (uтр= (1,25… 1,33)× uр).
Принимаем uтр= 10
Для всех технологических и транспортных роторов, входящих в роторную линию, соблюдаем основное условие компоновки:
Dp/Dтр= Rp/Rтр= uр/uтр= nр/nтр= const (8)
Из соотношения (8) определяются радиус начальной окружности Rтр и частота вращения nтр транспортного ротора:
Rтр= uтрRp/uр ;
nтр= nрuр/uтр
Rтр= 75 мм
nтр= 100 об/мин
2. Расчет элементов инструментального блока
|
|
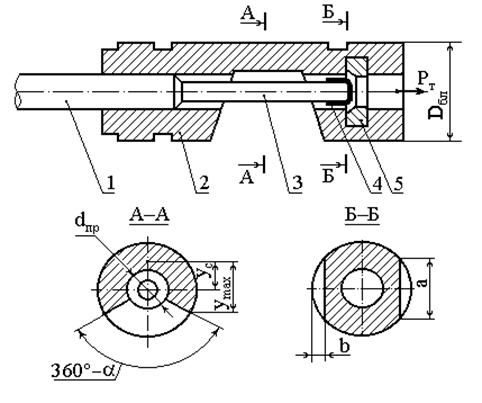
Рис. 3. Расчетная схема инструментального блока:
1– ползун; 2– корпус; 3– пуансон; 4– заготовка;
5– матрица
Элементы инструментальных блоков (ИБ) рассчитываются на прочность в опасных сечениях от действия растягивающих (сжимающих) сил и изгибающих моментов. Расчетная схема ИБ для штамповочных операций представлена на рис. 3.
Корпус блока рассчитывается на растяжение и изгиб в сечении А-А:
![]() (9)
(9)
где Рт – номинальное технологическое усилие, Н;
F – площадь расчетного сечения А–А, мм2;
Ix – момент инерции сечения, мм ;
yc – координата центра тяжести сечения, мм;
ymax – расстояние от центра тяжести до наиболее удаленной точки сечения, мм;
[s]– допускаемые напряжения материала корпуса блока, МПа.
Площадь сечения F, момент инерции Ix, координата центра тяжести yc и координата ymax рассчитываются по формулам:
F= p/8 (Dбл2 - dпр2) a/180;
Jx = (Dбл4 - dпр4)/128 (pa/180+sin a);
yc = 120/pa ((Dбл3 - dпр3)/ (Dбл2 - dпр2) sin (a/2));
yмах = yc - Dбл/2 cos (a/2),
где Dбл – диаметр инструментального блока, мм;
dпр – диаметр приемника детали, мм.
F= 650,68 мм2
Jx = 5164640,98 мм4
yc = 7,51 мм
yмах = 10,64 мм
s = 0,31 МПа < [sдоп]
Условие прочности выполняется.
Размеры Dбл и dпр определяются по чертежу инструментального блока.
Опорные поверхности крепления ИБ в блокодержателе рассчитываются на смятие в сечении Б–Б:
sсм=Pт/2Fоп ![]() [sсм]
[sсм]
где Fоп– площадь опорных поверхностей, мм;
[sсм]– допускаемое напряжение на смятие материала корпуса, МПа.
Площадь опорных поверхностей определяется по приближенной формуле:
Fоп=2/3 аb
Fоп = 58.66 мм
sсм = 1,7 < [sдоп]
Условие прочности выполняется.
3. Расчеты на прочность элементов конструкции
механического привода
3.1. Силы, действующие на элементы привода
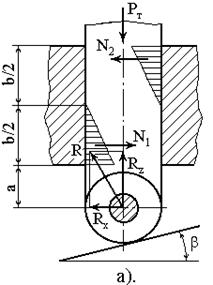
Для определения напряжений, возникающих в элементах механического (кулачкового) привода рабочего движения роторных машин под действием заданной технологической силы Рт (см. рис. 4.а.), необходимо установить величины полной реакции R и ее осевой и окружной составляющих Rz и Rx. Полная реакция R необходима для расчета на срез и смятие оси ролика ползуна. Составляющая Rx необходима для расчета ползуна на изгиб. Составляющая Rz воспринимается осевыми опорами вала ротора и необходима для выбора осевых подшипников ротора. Конструктивными размерными элементами, от которых при заданной величине технологической силы Рт зависят значения R, Rx, Rz являются: вылет ползуна а, длина направляющей барабана b и угол подъема копира b.
Полная реакция копира R нагружает ползун изгибающим моментом, вызывающим нормальные к оси ползуна силы N1 и N2 (рис. 4.а). Эти силы являются реакциями направляющей поверхности барабана и учитываются при расчете на прочность перемычки между направляющими отверстиями.
Значения сил R, Rx, Rz, N1 и N2 определяются формулам:
R=PтКт; Rx=PтKx; Rz=PтKz
N1=3/2 PтКх(a/b+5/6)
N2=3/2 PтKх(a/b+1/6)
где Кт, Кх, Кz– коэффициенты пропорциональности,учитывающие
|
|
|
|