Проектирование и предварительный расчет точности полигонометрического хода при создании геодезического обоснования
7. Критерии вытянутости хода
Проложить полигонометрический ход с углами поворота в 180° практически невозможно, поэтому ход может считаться вытянутым с некоторым приближением. Критерии степени изогнутости хода необходимы при расчетах точности ходов при их проектировании.
Ход можно считать достаточно вытянутым, если точки хода отклоняются в обе стороны от линии, проведенной через центр тяжести параллельно замыкающей хода, в среднем на величину 1:24 ( в пределе на 1:8) длины самой замыкающей, и линии хода отклоняются от направления замыкающей в обе стороны на 8°( в пределе на 24°). При этом предельного значения может достигнуть лишь одна из ординат или один из углов отклонения.
В качестве критерия степени изогнутости используется отношение [s]:L. Ход считается вытянутым, если [s]:L![]() l,3 (рис.1)
l,3 (рис.1)
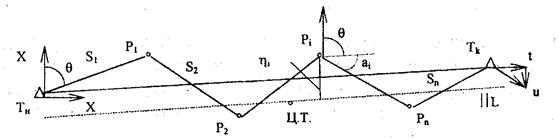
Рис. 1.Критерии степени изогнутости хода
Запроектированный в данной работе ход, является вытянутым, так как [s]/L = 1,02, и величины предельного значения уклонения направления сторон хода от направления замыкающей Θ, и расстояния от вершины хода до замыкающей, как следует из чертежа, меньше предельных значений.
8. Расчет точности полигонометрического хода
Точность хода характеризует предельная ошибка Dпред планового положения точки в самом слабом месте после уравнивания.
Учитывая, что средняя квадратическая ошибка m положения точки хода в самом слабом месте (в середине) после уравнивания равна половине средней квадратической ошибки M конечной точки до уравнивания, т.е.
![]() , получаем Dпред = 2m = M .
, получаем Dпред = 2m = M .
Значение M можно определить из выражения
пред×fS = 2M,
в котором предельная линейная невязка пред×fS находится в соотношении
![]() ,
,
где [S] - длина хода;
![]() - точность полигонометрического хода соответствующего класса, устанавливаемая инструкцией по построению сетей.
- точность полигонометрического хода соответствующего класса, устанавливаемая инструкцией по построению сетей.
![]()
пред×fS=0.39 м
Для вычисления отношения [S]:T стороны хода возьмем из решения обратных геодезических задач по прямоугольным координатам X,Y.
Следовательно,
![]() (1)
(1)
![]()
Самое слабое место запроектированного полигонометрического хода длиной L характеризуется величиной ошибки, вычисленной по формуле (1).
9. Расчет точности положения конечной точки хода
Вычисления производят с помощью формулы средней квадратической погрешности положения конечной точки полигонометрического хода М. Ее величина при вычислении хода по исправленным за угловую невязку углам может быть подсчитана при измерении сторон светодальномерами и короткобазисным параллактическим методом по формуле
![]()
где тS, тβ — соответственно средние квадратические погрешности измерения стороны и угла;
Dц, i —расстояние от точки с номером I до центра тяжести хода.
Ошибка положения конечной точки М при исправленных за невязку углах зависит от ошибок измерений, степени изогнутости хода и количества углов поворота.
Для ходов вытянутой формы с примерно равными сторонами формулу следует заменить формулой
![]()
Применив принцип равных влияний, т. е. равенство влияний погрешностей угловых и линейных измерений на конечный результат, можно записать для хода любой формы
Для вытянутого хода эти соотношения соответственно примут вид
![]()
![]()

При равных условиях, предварительное исправление углов понижает влияние угловых измерений на поперечную невязку вытянутого хода примерно вдвое и уменьшает общий сдвиг конечной точки хода.
10. Расчет точности линейных измерений
В зависимости от применяемых методов линейных измерений средняя квадратическая ошибка M в положении конечной точки вытянутого хода при предварительно уравненных углах, при измерении линий светодальномером, может быть вычислена по формуле:
![]() ;
;
Применяя принцип равных влияний, т.е. считая, что угловые и линейные измерения одинаково влияют на точность положения конечной точки хода, среднюю квадратическую ошибку измерения сторон можно вычислить, используя выражения:
![]()
Расчет точности линейных измерений следует произвести для светодальномеров, применяемых в производстве в настоящее время. При выборе любого из светодальномеров должно соблюдаться условие
![]() .
.
![]()
![]()
![]()
![]()
Рекомендуемый светодальномер типа Кварц обеспечивает требуемую точность полигонометрического хода. Основные технические характеристики светодальномеров указаны в табл.2
Таблица 2
Основные технические характеристики светодальномеров
|
Характеристика |
Тип дальномера | |||||||
|
Кварц |
Рейндж мастер США |
Гранат |
Мекометр 3000 |
ДК-001 |
2СМ-2 |
СМ-5 |
Блеск | |
|
Диапазон расстояний, км |
1-30 |
0,001-60 |
0,1-20 |
0,01-2,5 |
0,0005-0,5 |
0,002-2,0 |
0,002-0,700 |
0,0002-5,0 |
|
Средняя квадратическая погрешность измерения расстояния, мм |
10+ 2×10-6Д |
5+ 1×10-6Д |
5+ 2×10-6Д |
0,2+ 1×10-6Д |
0,8+ 1,5×10-6Д |
20 |
20¸30 |
10+ 5×10-6Д |
|
Минимальные углы наклона приемопередатчика |
±9° |
±15° |
±20° |
+40° ¸ -45° |
-40° ¸ 90° |
+25° |
±20° |
±20° |
|
Время измерения расстояния |
5" |
10" |
2-3¢ |
10¢ |
10¢ |
5" |
10¢ | |