Обзор и анализ технологий уборки зерновых культур различными способамиРефераты >> Ботаника и сельское хоз-во >> Обзор и анализ технологий уборки зерновых культур различными способами
разработаны машины, в которых зерно отделяется от метелки на корню при исследовательном прочесывании стеблей специальными гребенками или щетками размещенными на барабане. Установлено, что при уборке методом очеса растений на корню получается меньший зерносоломистый ворох, который состоит для риса из 70-80% свободного зерна, 20-30% оборванных метелок и 5-7% соломистых частиц. Очесывающий аппарат можно устанавливать на специальный комбайн в качестве приставки к серийному комбайну и в варианте, когда мелкий зерносоломистый ворох направляется от очесывающего аппарата в бункер, а затем выгружается в тележку и вывозится на стационарный пункт, где из него выделяют зерно и необмолоченные метелки.
На основании обзора и анализа существующих технологий уборки зерновых культур можно сделать краткий вывод, что при применении какой либо из технологий уборки необходимо учитывать природно-климатические, технические и экономические условия хозяйства. Все технологии имеют свои преимущества и недостатки. Рассмотренные безкомбайновые технологии уборки зерновых культур имеют ряд недостатков, которые не позволяют широко применять.
К таким недостаткам относится: большое число транспортных средств, чтобы доставить весь биологический урожай на стационарные комплексы, используемая техника и оборудование менее универсально в отличие от комбайнового способа уборки, большое использование электроэнергии, использование приспособленных для этих технологий серийных машин малоэффективно и не найдет широкого применения в хозяйствах.
По этим причинам наиболее эффективным и широко применяемым способом для уборки зерновых культур является комбайновый способ уборки. Но конструкторские разработки достигли наивысших увеличение производительности молотилки ведет к увеличению и без того большие габариты и массу комбайна.
Так как, производительность комбайна нельзя увеличить, то необходимо усовершенствовать и разрабатывать новые приспособления и приставки к машине, которые позволяют увеличить производительность комбайна.
2. Конструкторская разработка
2.1 Анализ влияния конструктивно-кинематических параметров жатки на надежность и качество выполнения технологического процесса
Анализ отказов зерноуборочных комбайнов, проведенный на основе результатов испытаний в условиях эксплуатации, показал, что свыше 20% от общего числа их приходится на жатки. Если учитывать показания посторонних предметов (камней) в рабочие органы жаток, то доля отказов еще больше возрастет. При классификации их по группам сложности установлено, что 70% отказов относится к первой группе сложности и около 25% ко второй.
Основные причины отказов привода рабочих органов жатки - недостаточные жесткость и прочность конструкций, низкое качество сварки, т.е. причины как конструкционного, так и технологического характера. В следствии воздействия переменных нагрузок (в первую очередь от возвратно поступательных движущихся масс) из-за усталостных явлений происходят разрушения подшипников, валов колебателей, деформация и разбивание подвесок ножей, излом компенсирующей пластины, поломки валов и соединительных элементов. Как показывает практика не все комбайнеры а так же специалисты не могут правильно провести регулировку привода режущего аппарата жатки (биение торца вала качающейся шайбы - не должно превышать 0,5 мм), т.е. регулируется на глаз, а не при помощи инструкций по регулировки и измерительных приборов, что приводит к повышенной вибрации привода, шуму, разрушения подшипников качающейся шайбы, в результате чего увеличивается простой техники в поле и снижения суточной производительности.
2.2 Обзор существующих конструкций
Проводя поиск новых изобретений, привода режущего аппарата жатки, в патентном бюро Красноярской краевой научной библиотеки, я, из большого количества предлагаемых конструкторских разработок, отобрал несколько вариантов, которые предлагаю рассмотреть в этой части дипломного проекта и сравнить их с предлагаемой мною конструкцией механизма привода режущего аппарата травяной жатки кормоуборочного комбайна.
2.2.1 Рассмотрим первый привод режущего аппарата. Авторское свидетельство №1068065
Изобретение относится к сельскохозяйственному машиностроению и используется в механизмах привода режущих аппаратов. Цель изобретения - увеличение надежности привода за счет снижения уровня вибрации и динамических нагрузок в его звеньях путем исключения избыточных связей.
На рисунке 1 приведена кинематическая схема привода.
Привод режущего аппарата, содержащий основание-1, на котором закреплен дифференциальный редуктор-2, ведущие валы-3, качающиеся шайбы-4, валы колебателен с рычагами-5, шатуны-6, коромысла-7, нож-8, колен валов 3 расположенных в одной плоскости под углом 180°. На основании 1 на подшипниках качения 9 установлены ведущие валы-3. На ведущих валах на подшипниках качения 10 установлены качающиеся шайбы 4. качающиеся шайбы 4 сопрягаются с валами колебателей 5 с помощью игольчатых подшипников 11. валы колебателей установлены на основании 1 с помощью сферических шарниров 12, допускающих осевое смещение.
Механизм работает следующим образом: вращение ведущих валов 3, осуществляется от дифференциального редуктора 2, преобразующая в сферическое движение качающимися шайбами, совершают движение ножа синфазное качательное движение. Качательное движение валов колебателей 5 преобразуется в возвратно-поступательное движение ножа 8 с помощью шатунов и коромысел 7. в предлагаемом привод в виду отсутствия избыточных связей при сборке и монтаже происходит автоматическая установка звеньев 3,4,5 таким образом, что компенсирует погрешности изготовления звеньев привода.
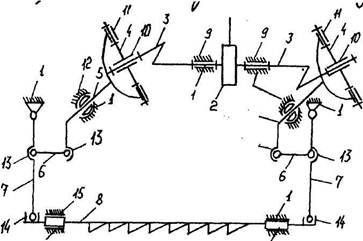
Рис.1 кинематическая схема привода, р. а.
Преимуществом предлагаемого привода по сравнению с прототипом является уменьшение износа в кинематических парах, повышение коэффициента полезного действия, уменьшение продолжительности обкатки, самоустанавливаемость звеньев.
Кроме того, в предлагаемом приводе перемещение ножа осуществляется постепенно путем вытягивания ножа относительно противорежующих пластин попеременно с одной и другой стороны.
Недостаток привода в том, что дифференциальный редуктор придется расположить под питающим устройством комбайна, что затруднит условие монтажа и демонтажа, и усложнит передачу крутящего момента от ВОМ к редуктору привода.
2.2.2 Следующий привод разработан производственным объединением "Тульский комбайновый завод"
На рисунке 2 показан общий вид привода режущего аппарата.
Привод режущего аппарата содержит приводной вал 1, на свободном конце которого размещен кривошип, выполненный в виде пары зубчатых колес 2 и 3 с одинаковым числом зубьев, находящихся в зацеплении и размещенных в корпусе 4 на осях 5 с постоянным межцентровым расстоянием. Колесо 2 эксцентрично закреплено на приводном валу 1, а колесо 3 при помощи эксцентрично установленной оси 6 соединено с одним из концов шатуна 7, другой конец которого связан с узлом изменения направления исполнительного движения выполненным в виде зубчато-реечного механизма, состоящего из двух, расположенных друг к другу реек 8 и 9, контактирующих с колесом 10, установленным в корпусе 11 на оси 12, причем рейка 8 соединена с шатуном 7, а рейка 9 кинематически связана с подвижным ножом 13 режущего аппарата.