Сеть на основе нейрочипаРефераты >> Коммуникации и связь >> Сеть на основе нейрочипа
Приведенные примеры показывают, что модель ISO/OSI не требует интеграции всех семи уровней в реальную систему.
Функции нереализованных уровней можно перенести на другие уровни. Почти все Fieldbus-системы, используемые для автоматизации процессов, имеют всего три уровня, тогда как те, что применяются для автоматизации зданий, имеют по крайней мере пять уровней. LonWorks - одна из немногих Fieldbus-систем, в которой присутствуют все семь уровней. Это объясняется двумя причинами. Первая указана почти во всех изданиях корпорации ECHELON: при универсальности применения LonWorks полностью обеспечивает объединение сетей компьютеров.
Вторая причина упоминается не так часто. Уже сейчас видно, что LonWorks в конечном итоге значительно превзойдет производительность всех существующих Fieldbus-систем. Если на сегодняшний день мы еще не можем автоматизировать все возможные процессы с помощью LonWorks, то уже в недалеком будущем такая возможность представится.
Еще несколько замечаний относительно модели ISO/OSI. Различают два направления коммуникации [рис.1-6]. Коммуникация между некоторым уровнем п и уровнем выше (n +1) осуществляется посредством интерфейса, построенного на основе спецификаций служб. Верхний уровень является «пользователем служб» (SU, Service User), а нижний - их «поставщиком» (SP, Service Provider). Обмен информацией между уровнями осуществляется в точках доступа к службе (Service Access Points, SAP), причем элемент более высокого уровня может обращаться к элементу более низкого уровня. Это важно, если, например, нужно соединить уровни с помощью другого пути, что достигается выбором специальных SAP.
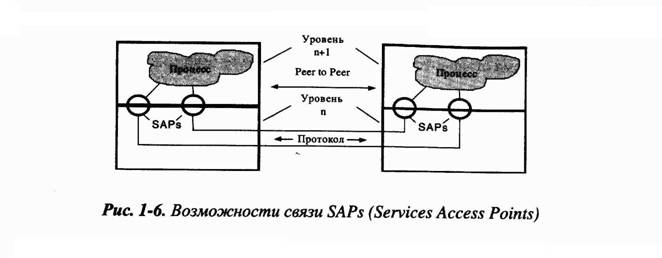
Горизонтальная коммуникация (коммуникация между двумя одинаковыми лежащими напротив друг друга уровнями) осуществляется посредством протокола типа Peer-to-Peer - протокола взаимодействия между элементами сети. Таким образом, на семи уровнях существует семь протоколов.
1.4. Топологии
Сети можно классифицировать по физической и логической структуре. Высказывание «сеть построена по принципу кольцевой или шинной структуры» является неполным. Например, в основе Fieldbus-системы может быть физическая шина, которой на верхнем уровне соответствует логическое кольцо. Возможен и обратный вариант. Вопрос о том, какая архитектура оптимальна, решают по-разному в каждом конкретном случае. LonWorks предполагает различные топологические структуры, и все они имеют право на существование. Рассмотрим их разновидности.
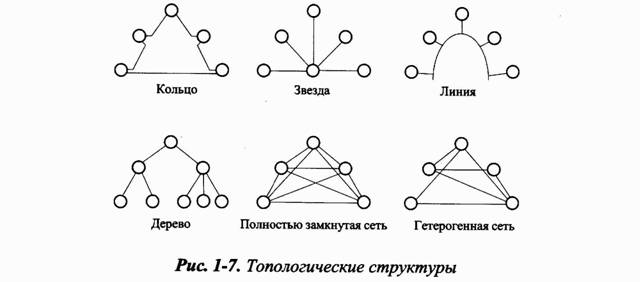
С точки зрения реализации самая простая структура — кольцо [рис1-7], в котором все узлы соединены друг с другом по принципу «точка-точка». Механизмы передачи данных могут использоваться самые различные. Наиболее быстрым в области Fieldbus-систем является «способ сдвигающего регистра»: каждый узел имеет в своем распоряжении такой регистр, который сдвигает поступающие данные. Поскольку все узлы логически соединены последовательно, то кольцо образует один большой сдвигающий регистр, состоящий из отдельных узлов - сдвигающих регистров. Явная адресация в этом случае отсутствует, кадр идентифицируется по его началу; после фазы конфигурации каждый узел может самостоятельно определить, какие биты зарезервированы для него. Если предположить, что все узлы посылают и принимают данные с максимально возможной скоростью, то система теоретически имеет наименьшее время реакции.
Однако на практике наибольший интерес представляют кольца другого типа. Представьте себе кольцо, в котором узлы могут принимать и посылать данные в обоих направлениях. Если разрушить такое кольцо в какой-либо точке, то для передачи данных на все остальные узлы можно использовать противоположное направление. Это часто необходимо для систем, требующих высокой надежности (например, системы наблюдения). LonWorks допускает такой вид топологии.
При топологии типа «звезда» вся информация проходит через центральный узел. Как и в кольце, все связи строятся по принципу «точка-точка», что часто упрощает систему коммуникационной техники и разводки кабеля. Многие локальные сети, физически построенные по типу «линия» или «кольцо», имеют разводку кабеля, подобную «звезде». Однако системы типа «звезда», несмотря на их широкое распространение, являются коммутационными. Все основные функции коммутационной системы сосредоточены в центральном коммуникационном устройстве. Терминальное оборудование (телефонные аппараты, факс-машины и т. д.) обладает относительно невысоким интеллектом; отсюда следует, что его можно покупать по довольно низкой цене. Причем производительность и интеллект находятся в одном центральном устройстве, что упрощает обслуживание системы.
Применительно к системам управления топология типа «звезда» обладает рядом преимуществ: контроллер с программируемой памятью является классической централизованной системой. Внедрение интеллектуальных компонентов ввода/вывода в области автоматизации технологических процессов до сих пор не достигло значительного продвижения на рынке; контроллеры с программируемой памятью и на сегодняшний день играют доминирующую роль. Для широкого распространения децентрализованных систем нужно провести серьезную работу.
«Шина» - лучше называть ее «линия» - одна из самых широко распространенных топологических структур. Однако следует помнить об ее недостатке. Несмотря на то, что каждый узел электрически имеет всего одно соединение с линией, физически для подключения требуются либо сдвоенные, либо Т-образные разъемы, затраты на которые часто недооценивают. Значительная часть стоимости узла приходится именно на соединение, из-за чего эта структура не может применяться во многих последовательных системах, хотя в параллельных способна обеспечить более высокую производительность.
Основной проблемой этой топологической структуры является доступ к шине . В связи с этим необходимо упомянуть один очень важный аспект: для многих приложений требование «real-time» (реального масштаба времени) является критическим. Под реальным масштабом времени подразумевается гарантированное время реакции системы. Например, водитель автомобиля должен иметь гарантию, что при нажатии на педаль тормоза желаемый эффект торможения будет достигнут без задержки.
Рассмотрим этот аспект более подробно. Полное время задержки реакции есть сумма задержек всех процессов, происходящих в системе. Задержка, вызываемая шиной, может быть минимальной по сравнению с другими - в этом случае она не оказывает существенного влияния на процесс управления. Существует и еще один момент, которому часто не уделяют должного внимания. Real-time требуют многие системы, однако, по экономическим соображениям, определенное время реакции обычно гарантируют лишь с высокой вероятностью. Какой смысл гарантировать время реакции «абсолютно», в то время как надежность системы задается вероятностными величинами (ведь система может включать в себя множество непомехозащищенных электронных компонент)? Если время задержки гарантируется с экономически приемлемой вероятностью, этого вполне достаточно. Эта идея и была подхвачена LonWorks (LonWorks гарантирует время доступа с определенной вероятностью, которую, можно определить так, что система будет пригодна даже в случаях, касающихся безопасности человека).