Краевые задачи строительной механики. Оболочки составные и со шпангоутами. Метод А.Ю.ВиноградоваРефераты >> Авиация и космонавтика >> Краевые задачи строительной механики. Оболочки составные и со шпангоутами. Метод А.Ю.Виноградова
Два последних уравнения при объединении образуют уравнение:
![]() .
.
В точке сопряжения ![]() аналогично получим уравнение:
аналогично получим уравнение:
![]() .
.
Если бы оболочка состояла бы из одинаковых участков, то мы могли бы записать в объединенном матричном виде систему линейных алгебраических уравнений в следующей форме:
 .
.
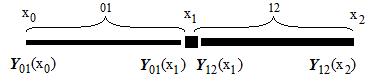
Но в нашем случае оболочка состоит из 3 участков, где средний участок можно считать, например, шпангоутом, выражаемым через свои дифференциальные уравнения.
Тогда вместо векторов ![]() ,
, ![]() ,
, ![]() ,
, ![]() мы должны рассмотреть вектора:
мы должны рассмотреть вектора:
![]() .
.

Тогда матричные уравнения
![]()
![]() ,
,
![]() ,
,
![]()
примут вид:
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
После перестановки слагаемых получаем:
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
В итоге мы можем записать итоговую систему линейных алгебраических уравнений:
Эта система решается методом Гаусса с выделением главного элемента.
В точках, расположенных между узлами, решение находиться при помощи решения задач Коши с начальными условиями в i-ом узле:
![]() .
.
Применять ортонормирование для краевых задач для жестких обыкновенных дифференциальных уравнений оказывается не надо.
4. Шпангоут, выражаемый не дифференциальными, а алгебраическими уравнениями.
Рассмотрим случай, когда шпангоут (в точке ![]() ) выражается не через дифференциальные уравнения, а через алгебраические уравнения.
) выражается не через дифференциальные уравнения, а через алгебраические уравнения.
Выше мы записывали, что:
![]()
Можем представить вектор ![]() силовых факторов и перемещений в виде:
силовых факторов и перемещений в виде:
 ,
,
где ![]() - вектор перемещений,
- вектор перемещений, ![]() - вектор сил и моментов.
- вектор сил и моментов.
Алгебраическое уравнение для шпангоута:
![]() ,
,
где G – матрица жесткости шпангоута, R – вектор перемещений шпангоута, ![]() – вектор силовых факторов, которые действуют на шпангоут.
– вектор силовых факторов, которые действуют на шпангоут.
В точке шпангоута имеем:
![]() ,
,
то есть нет разрыва в перемещениях ![]() , но есть результирующий вектор силовых факторов
, но есть результирующий вектор силовых факторов ![]() , который складывается из сил и моментов слева плюс сил и моментов справа от точки шпангоута.
, который складывается из сил и моментов слева плюс сил и моментов справа от точки шпангоута.
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
![]() , где
, где ![]() ,
,
что справедливо, если мы не забываем, что в данном случае имеем:
 ,
,
то есть вектор перемещений и силовых факторов составляется сначала из перемещений (выше) ![]() , а потом из силовых факторов (ниже)
, а потом из силовых факторов (ниже) ![]() .
.
Здесь необходимо вспомнить, что вектор перемещений ![]() выражается через искомый вектор состояния
выражается через искомый вектор состояния ![]() :
:
 ,
,
 ,
,
где для удобства было введено переобозначение ![]() .
.
Тогда можем записать:
![]() ,
,

Запишем матричные уравнения для этого случая:
![]()
![]() ,
,
![]() ,
,
![]() .
.