Высокомоментные двигателиРефераты >> Технология >> Высокомоментные двигатели
ВВЕДЕНИЕ
Электрические моментные двигатели постоянного тока широко используются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники.
Теория, разработка и применение этих двигателей в последние годы получили значительное развитие.
Разработчики различных систем управления при выборе исполнительного двигателя сталкиваются с рядом задач. Это –определение целесообразности применения моментных двигателей, которые наряду с крупными достоинствами нередко имеют значительно большие энергопотребление и массу, чем быстроходные двигатели с редуктором. Кроме того, это выбор структуры и значений параметров системы управления приусловии сравнительно большой электромеханической постоянной времени. При проектировании моментных двигателей для конкретной системы необходимо выбирать технические данные на его разработку по известным характеристикам нагрузки и входного воздействия, а также, исходя из требований к системе, выбирать конструкцию двигателя, выполнять необходимые расчеты.
Целью настоящего проекта является разработка универсального лабораторного стенда для исследования высокомоментного двигателя.
1 ОСНОВНЫЕ ПОЛОЖЕНИЯ
Моментным двигателем (МД) называется электромеханический преобразователь, на вход которого подается электрический сигнал постоянного или переменного тока, а выходом является электромагнитный момент, при котором в рабочем режиме ротор либо неподвижен, либо вращается с весьма малой скоростью.
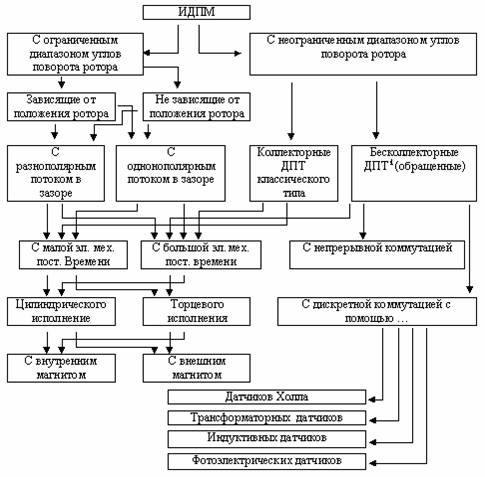
Рисунок 1
1.1 Область применения МД
1.1.1 В коррекционных устройствах гидросистем (для компенсации возмущающих моментов, вызывающих прецессию оси гироскопа).
1.1.2 В стабилизирующих устройствах (система управления положением разных более крупных объектов: антенна, прицел и т.п.).
1.1.3 В устройствах силовой компенсации (в системах с отрицательными о.с.).
1.1.4 Используются в качестве электрических пружин.
1.1.5 Используют в качестве натяжных устройств, чтобы регулировать или сохранять неизменной силу натяжения провода, ленты, цепи и т.п.
1.1.6 В качестве поворотных электромагнитов управляющих заслонками, клапанами, тормозными устройствами и т.п.
1.1.7 В тиристорных, транзисторных электроприводах (далее ЭП) и в приводах подач металлорежущих станков.
1.2 Основные требования к МДПМ
1.2.1 Заданный диапазон углов поворота ротора[1].
1.2.2 Заданная зависимость момента от положения ротора1.
1.2.3 Заданная зависимость момента от сигнала, подаваемого в ОУ. В большинстве случаев эта зависимость линейная.
1.2.5 Отношение![]() , что особенно важно при маломощных источниках питания. С увеличением Mэм и размеров МДПМ потребляемая мощность на единицу момента обычно уменьшается.
, что особенно важно при маломощных источниках питания. С увеличением Mэм и размеров МДПМ потребляемая мощность на единицу момента обычно уменьшается.
1.2.6 При отсутствии тока в ОУ, остаточный момент должен быть весьма мал (вообще отсутствовать).
1.2.7 Tэм, Tэ должны быть как можно меньше. Большие постоянные времени снижают быстродействие и могут привести к неустойчивости следящей системы.
1.2.8 Чувствительность, определяемая наименьшей мощностью сигнала, на которую система начинает реагировать, должна быть высокой.
1.2.9 Масса и габариты ® min.
1.2.10 Устойчивость по отношению к внешним воздействиям (температура, вибрация, удары, давление, влажность, ускорение, радиация и т.п.).
1.3 Достоинства высокомоментного двигателя
1.3.1 Благодаря отсутствию обмотки возбуждения (ОВ) и потерь в этих обмотках машины с постоянными магнитами имеют по сравнению с машинами электромагнитного возбуждения более высокий КПД, облегченные условия охлаждения.
1.3.2 Малые габариты и масса.
1.3.3 Более стабильное возбуждение (поток постоянных магнитов не зависит ни от частоты вращения ни от напряжения ни от температуры).
1.3.4 Простота конструктивного исполнения, когда магнитная система представляет собой намагниченное определенным образом кольцо из магнитотвердого материала.
1.3.5 Наличие постоянных магнитов (ПМ) обеспечивает высокие значения углового ускорения в переходных режимах работы.
1.3.6 Наличие ПМ обеспечивает равномерный ход при малых частотах вращения.
1.3.7 Наличие ПМ обеспечивает способность выдерживать большую перегрузку по току без размагничивания магнитной системы.
1.4 Недостатки высокомоментного двигателя
1.4.1 Напряжение генераторов и частоту вращения двигателей невозможно регулировать изменением поля возбуждения.
1.4.2 При мощности более десятков ватт они уступают по габаритным размерам, массе и стоимости машинам электромагнитного возбуждения.
1.4.3 Материалы, входящие в состав сплавов для ПМ дефицитны.
1.4.4 Технология изготовления и намагничивания ПМ отличается большой сложностью.
1.4.5 Существенное размагничивающее действие МДС якоря.
1.4.6 Запрещается в МДПМ вытаскивать ротор без замены его на какое-нибудь металлическое тело таких же размеров.
1.5 Конструктивные разновидности высокомоментного двиателя
Следует отметить, что у некоторых МД с неограниченным углом поворота ротора частота вращения в установившемся режиме может оказаться довольно значительной (в таких случаях нельзя провести четкую грань между МД и тихоходным двигателем). Однако если этот МД используется в следящей системе, и он, работая в режиме частых пусков и реверсов, в основном вращается с малой частотой; следовательно, и в этом случае также можно считать, что энергия, подводимая из сети, почти полностью выделяется в виде тепла в обмотках. МД постоянного тока широко применяются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники. Эти двигатели используются в гироскопах и акселерометрах, в приводах антенн, телескопов, фотоаппаратов, солнечных и звездных датчиков, роботов и манипуляторов; в автоматических построителях графиков; в качестве силовых компенсаторов в измерительных системах; в качестве элементов электрогидравлических и электропневматических приводов; в качестве электрических пружин поворотных электромагнитов и т. д. .
Если МД работает в режиме слежения, то его роль аналогична роли быстроходного исполнительного двигателя в сочетании с редуктором. Однако МД, нередко обладая большими, чем у редукторного привода, энергопотреблением, массой и электромеханической постоянной времени, имеет по сравнению с редукторным приводом весьма существенные преимущества. К ним относятся высокая разрешающая способность МД вследствие отсутствия неизбежных в редукторе МД постоянного тока широко применяются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники. Эти двигатели используются в гироскопах и акселерометрах, в приводах антенн, телескопов, фотоаппаратов, солнечных и звездных датчиков, роботов и манипуляторов; в автоматических построителях графиков; в качестве силовых компенсаторов в измерительных системах; в качестве элементов электрогидравлических и электропневматических приводов; в качестве электрических пружин поворотных электромагнитов и т. д. .