Моделирование систем управленияРефераты >> Кибернетика >> Моделирование систем управления
Cp1*r1*V1*dTвых/dt= K*S *(Tтвых-Tвых) +DH* A *exp(-E/(R*T))*CА*CВ *V1 (5)
T½t=0 =TBX
3) Запишем тепловой баланс для рубашки:
D(Cp2*r2*V2*Tтвых)=Gтвх*r2*Сp2*(Tтвх-Tтвых) *Dt-K*S*(Tтвых-Tвых)*Dt (6)
Tт½t=0 =Tт BX
Сp2-теплоемкость теплоносителя [Дж/(кг*К)];
V2-объем рубашки,[м3];
r2 – плотность теплоносителя, [кг/м3];
Gт – расход теплоносителя, [м3 /с].
Преобразуем уравнение (6)
Cp2*r2*V2*dTTвых/dt=GTвх*r2*Сp2 *(Tтвх-Tтвых) -K*S *(Tтвых-Tвых) (7)
Tт½t=0 =Tт BX
4) Материальный баланс для рубашки:
Запишем общий материальный баланс:
Gtвх=Gtвых
Gt=0.1*(kv1+kv2)*(ÖPt-Pa/r2 )/3600 (8)
где kv1 и kv2 – пропускная способность клапанов горячего и холодного теплоносителя соответственно;
Pt- давление теплоносителя перед клапаном, Па;
Ра- давление теплоносителя в рубашке, Па.
Итак, имеются шесть уравнений для определения значений пяти выходных
переменных CА, СВ, CС, Tтвых, Tвых.
Таким образом, математическое описание динамики реактора с мешалкой и рубашкой периодического действия представляет собой систему дифференциальных уравнений (1), (2), (3), (5), (7), (8) с начальными условиями.
4 ИССЛЕДОВАНИЕ ДИНАМИКИ ОБЪЕКТА УПРАВЛЕНИЯ
Для получения некоторой переходной характеристики объекта необходимо каждый раз решать систему уравнений, описывающую его динамику.
4.1 Переходные характеристики объекта в динамическом режиме.
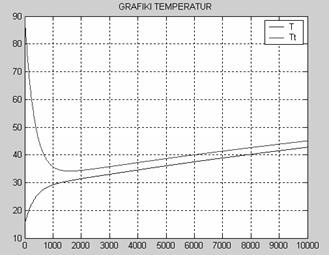
Рис.4 Переходные характеристики Т(t), Tt(t) объекта при подаче горячего теплоносителя в рубашку.
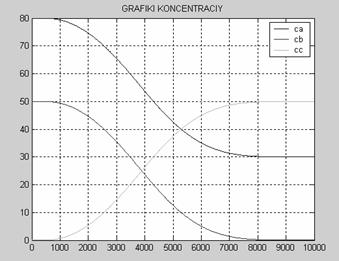
Рис. 5 Переходные характеристики СА(t), СВ(t), Сc(t) объекта при подаче горячего теплоносителя в рубашку.
Программа, описывающая динамику ОУ, представлена в приложении А.
4.2 Переходная характеристика при входном воздействии в виде кусочно-линейной зависимости
При получении переходной характеристики объекта по каналам Твх® СAвых, СBвых, СCвых, Gtвых, Тtвых, Твых в случае, если на объект действует ступенчатое воздействие, представленное на рис. 2, Полученная переходная характеристика, построенная с помощью программы приведенной в приложении Б, представлена на рис. 6
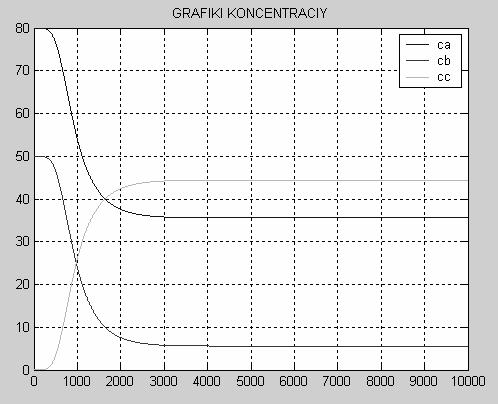
Рис. 6а Переходная характеристика объекта по каналам СAвых, СBвых, СCвых
в случае, если на объект действует ступенчатое возмущение.
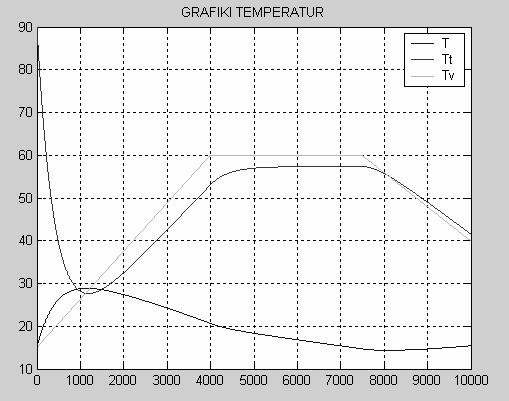
рис. 6б Переходная характеристика объекта по каналам Твых , Тв , Тtвых
в случае, если на объект действует ступенчатое возмущение.
5 ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕСООВ ВАТОМАТИЧЕСКОЙ
СИСТЕМЕ РЕГУЛИРОВАНИЯ
Выбор структуры АСР
Для регулирования температуры смеси на выходе реактора, соответствующей номинальному статическому режиму, можно изменять пропускную способность клапанов горячего и холодного теплоносителей на входе в рубашку, подавая их попеременно. Необходимо также подобрать оптимальные настройки регулятора, при которых объект будет иметь характеристику, максимально приближенную к заданному значению. В качестве чувствительного элемента введем датчик температуры на выходе реактора. Структурная схема этой АСР представлена на рис.7.
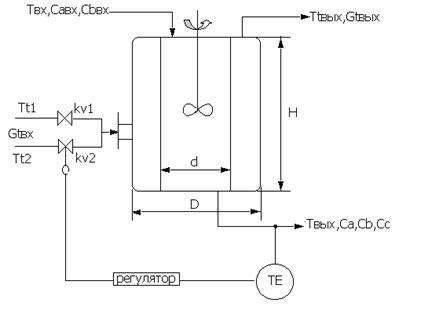
Рис. 7 Схема АСР температуры смеси на выходе из реактора
Для моделирования переходных процессов в АСР температуры смеси в реакторе, необходимо иметь математическое описание этой системы регулирования.
Уравнение регулятора, в качестве которого в нашем случае выбран ПИ-регулятор (объект инерционен), с введением динамической ошибки для заданной зоны нечувствительности и в заданном диапазоне измерения температуры, выглядит следующем образом:
Xp=Кp*E+1/TuòE*dt, где
E= Tизм- Tvx/Ео*100 – динамическая ошибка регулирования; Ео-размах шкалы;
Xp-отвечает за открытие клапанов и находится в пределах ограничения на выходные значения выходного сигнала;
Кр- коэффициент передачи регулятора;
Ти- время изодрома [c];
Запишем уравнение для датчика температуры на выходе регулятора:
Td* dTизм /dt= -Tизм+T, где
Td-инерционность датчика, с;
Tизм- температура смеси, измеряемая датчиком на выходе;
T- температура смеси на выходе из реактора.
Для того, чтобы рассчитать переходной процесс в АСР температуры смеси в реакторе, если на систему действует представленное на рис. 2 возмущающее воздействие, была разработана программа (см. приложение В), при этом Твх во времени изменялось в соответствии с заданием, а остальные входные переменные задавались согласно номинальному статическому режиму.
На рис. 8а, 8б, 8в показаны переходные процессы при задающем воздействии Tv(t), представленном на рис.2 с использованием ПИ-регулятора, а также изменение регулирующего значения Xp во времени при оптимальных настройках регулятора.
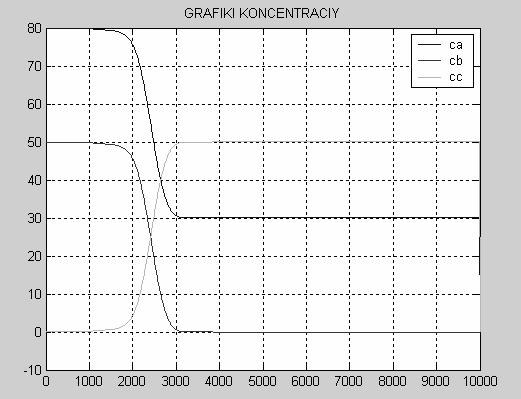
Рис 8а
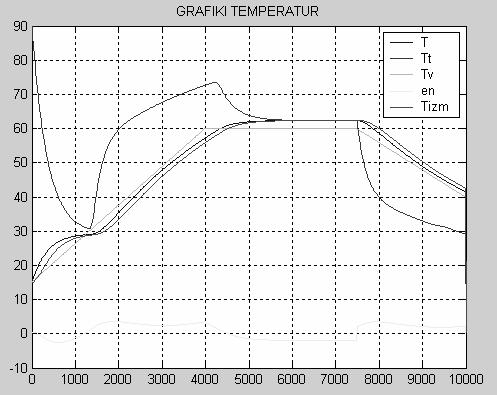
Рис 8б
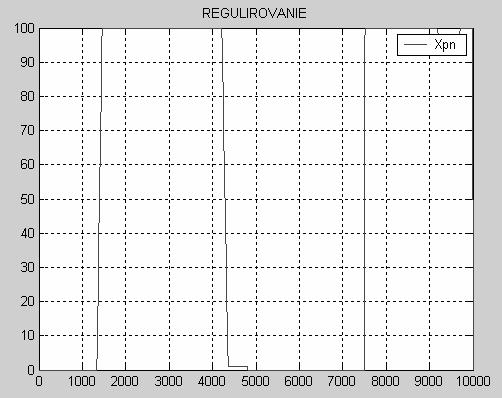
Рис 8в
Таким образом, исследовано динамическое поведение АСР температуры смеси на выходе из ёмкости в различных ситуациях при различных параметрах настройки регулятора, пропускной способности клапанов и законах регулирования. Это дало определённую информацию о системе регулирования и позволило выявить её характерные особенности.
ЗАКЛЮЧЕНИЕ
Основные результаты проведённых исследований состоят в следующем:
- проанализирован химический реактор с мешалкой и рубашкой периодического действия как объект управления;
- разработано математическое описание динамики объекта;
- получены и проанализированы динамические характеристики СА(t), СВ(t), Сc(t), Тт(t), Т(t) объекта;
- получена переходная характеристика по каналу передачи воздействия Твх®Т смеси в реакторе при подаче на объект заданного возмущения в виде кусочно-постоянной функции;
- предложена структура АСР температуры смеси на выходе из реактора;
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
1. Дудников Е.Г. Автоматическое управление в химической промышленности. М.: Химия, 1987.-386с.
2. Кроу К., Гамилец А., Хоффман Т. Математическое моделирование химических производств. М.: Мир, 1973.- 392 с.
3. Бояринов А.И., Кафаров В.В. Методы оптимизации в химической технологии.- М.:Химия, 1969.-564с.
4. Стандарт предприятия. Проекты дипломные и курсовые. Правила оформления. СТП ТИХМ 03-93.
5. Кулаков Ю.В., Шамкин В.Н. Математическое моделирование технологических объектов и систем управления. Тамбов, 1997.-40с.