Трехмерная компьютерная графикаРефераты >> Программирование и компьютеры >> Трехмерная компьютерная графика
Основной недостаток алгоритма - большой объем требуемой памяти. Если сцена подвергается видовому преобразованию и отсекается до фиксированного диапазона координат z значений, то можно использовать z-буфер с фиксированной точностью. Информацию о глубине нужно обрабатывать с большей точностью, чем координатную информацию на плоскости (x, y); обычно бывает достаточно 20 бит. Буфер кадра размером 512х512х24 бит в комбинации с z-буфером размером 512х512х20 бит требует почти 1.5 мегабайт памяти. Однако снижение цен на память делает экономически оправданным создание специализированных запоминающих устройств для z-буфера и связанной с ним аппаратуры.
Альтернативой созданию специальной памяти для z-буфера является использование для этой цели оперативной или массовой памяти. Уменьшение требуемой памяти достигается разбиением пространства изображения на 4, 16 или больше квадратов или полос. В предельном варианте можно использовать z-буфер размером в одну строку развертки. Для последнего случая имеется интересный алгоритм построчного сканирования. Поскольку каждый элемент сцены обрабатывается много раз, то сегментирование z-буфера, вообще говоря, приводит к увеличению времени, необходимого для обработки сцены. Однако сортировка на плоскости, позволяющая не обрабатывать все многоугольники в каждом из квадратов или полос, может значительно сократить этот рост.
Другой недостаток алгоритма z-буфера состоит в трудоемкости и высокой стоимости устранения лестничного эффекта, а также реализации эффектов прозрачности и просвечивания.
Более формальное описание алгоритма z-буфера таково:
Заполнить буфер кадра фоновым значением интенсивности или цвета.
Заполнить z-буфер минимальным значением z.
Преобразовать каждый многоугольник в растровую форму в произвольном порядке.
Для каждого Пиксел(x, y) в многоугольнике вычислить его глубину z (x, y).
Сравнить глубину z (x, y) со значением Z буфер(x, y), хранящимися в z-буфере в этой же позиции.
Если z (x, y) > zбуфер (x, y), то записать атрибут этого многоугольника (интенсивность, цвет и т. п.) в буфер кадра и заменить z-буфер(x, y) на z (x, y).
В противном случае никаких действий не производить.
В качестве предварительного шага там, где это целесообразно, применяется удаление нелицевых граней.
Если известно уравнение плоскости, несущей каждый многоугольник, то вычисление глубины каждого пиксела на сканирующей строке можно проделать пошаговым способом. Как известно уравнение плоскости имеет вид
ax + by + cz + d =0
z = - ( ax + by + d)/c ¹ 0
Для сканирующей строки y = const. Поэтому глубина пиксела наэтой строке, у которого x = x + Dx, равна
z1 - z = - (ax1 + d)/c + (ax + d)/c = a(x - x1)/c
или
z1 = z – (a/c)Dx
Но Dx = 1, поэтому z1 = - (а/с).
Алгоритм, использующий z-буфер, можно также применить для построения сечений поверхностей. Изменится только оператор сравнения:
z(x, y) > z-буфер(x, y) andz(x, y) £ Zсечения
где Zсечения - глубина искомого сечения. Эффект заключается в том, что остаются только такие элементы поверхности, которые лежат на самом сечении или позади него.
3.4. Алгоритм определения видимых поверхностей путём трассировки лучей
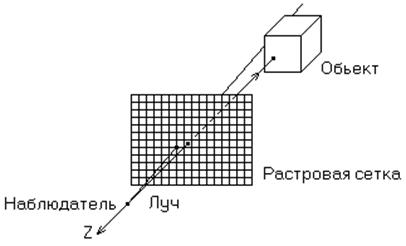
Оценки эффективности всех алгоритмов удаления невидимых поверхностей, изложенных ранее, зависят от определенных характеристик когерентности той сцены, для которой ведется поиск ее видимых участков. В отличие от них трассировка лучей является методом грубой силы. Главная идея, лежащая в основе этого метода, заключается в том, что наблюдатель видит любой объект посредством испускаемого неким источником света, который падает на этот объект и затем каким-то путем доходит до наблюдателя. Свет может достичь наблюдателя, отразившись от поверхности, преломившись или пройдя через нее. Если проследить за лучами света, выпущенными источником, то можно убедиться, что весьма немногие из них дойдут до наблюдателя. Следовательно, этот процесс был бы вычислительно неэффективен. В следствии этого было предложено отслеживать (трассировать) лучи в обратном направлении, т. е. от наблюдателя к объекту, как показано на рис. 3.11. В первом алгоритме трассировка прекращалась, как только луч пересекал поверхность видимого непрозрачного объекта; т. е. луч использовался только для обработки скрытых или видимых поверхностей. С течением времени был реализован алгоритм трассировки лучей с использованием общих моделей освещения. Эти алгоритмы учитывают эффекты отражения одного объекта от поверхности другого, преломления, прозрачности и затенения. Производится также устранение ступенчатости. Рассмотрим применением метода трассировки лучей для определения видимых или скрытых поверхностей.
Рис.3.11 служит иллюстрацией алгоритма трассировки лучей. В этом алгоритме предполагается, что сцена уже преобразована в пространство изображения. Перспективное преобразование не используется. Считается, что точка зрения или наблюдатель находится в бесконечности на положительной полуоси z. Поэтому
 |
 |
 |