Теория машин и механизмовРефераты >> Технология >> Теория машин и механизмов
ВВЕДЕНИЕ
Одной из ведущих отраслей современной техники является машиностроение. По уровню развития машиностроения судят о развитии производительных сил в целом. Прогресс машиностроения в свою очередь определяется созданием новых высокопроизводительных и надёжных машин. Решение этой важнейшей проблемы основывается на комплексном использовании результатов многих дисциплин и, в первую очередь, теории механизмов и машин.
Теория механизмов и машин - наука об общих методах исследования свойств механизмов и машин и проектировании их схем.
Качество создаваемых машин и механизмов в значительной мере определяется полнотой разработки и использования методов ТММ. Чем более полно будут учтены при построении механизмов и машин критерии производительности, надёжности, точности и экономичности, тем совершеннее будут получаемые конструкции.
В данном курсовом проекте требуется спроектировать и произвести кинематический, динамический и кинетостатический расчёт кулисного механизма транспортера.
Рационально спроектированная машина должна удовлетворять социальным требованиям - безопасности обслуживания и создания наилучших условий для обслуживающего персонала, а также эксплуатационным, экономическим, технологическим и производственным требованиям. Эти требования представляют собой сложный комплекс задач, которые должны быть решены в процессе проектирования нового механизма.
Решение этих задач на начальной стадии проектирования состоит в выполнении анализа и синтеза проектируемого механизма, а также в разработке его кинематической схемы, обеспечивающей с достаточным приближением воспроизведение требуемого закона движения.
В первом разделе исследуется кинематика кулисного механизма. Строится план механизма, план скоростей, графики моментов инерции, диаграмма энергомасс.
Во втором разделе производится силовой анализ рычажного механизма. Строится план ускорений. Определяются силы, действующие на механизм в двух положениях.
В третьем разделе проводится синтез кулачкового механизма. Строятся графики ускорений, скоростей и перемещения толкателя кулачка методом графического дифференцирования. Производится динамический синтез кулачкового механизма. Профилируется кулачок.
В четвертом разделе проводится синтез зубчатого механизма. Определяются параметры зубчатого зацепления и производится его вычерчивание.
1. СТРУКТУРНЫЙ АНАЛИЗ КУЛИСНОГО МЕХАНИЗМА.
Механизм – это система тел, предназначенных для преобразования одного или нескольких твердых тел в требуемое движение других тел.
Твердое тело, входящее в состав механизма называется звеном механизма. Звенья бывают подвижные и неподвижные. Неподвижные это те звенья относительно которых ведется изучение движения других звеньев, эти звенья называются стойками. Из подвижных звеньев выделяют выходные и входные.
Выходное звено – называется звено, которому сообщается движение преобразуемое механизмом в требуемое движение других звеньев.
Выходным звеном называется звено совершающее движение для которого предназначен механизм. Остальные звенья называются соединительными или промежуточными.
Движущим (ведущим) называют звено, для которого элементарная работа внешних сил приложенных к нему является положительной. Ведомым называется звено, для которого элементарная работа внешних сил приложенных к нему является отрицательной или равна нулю.
Подвижное соединение двух звеньев называется кинематической парой. По числу наложенных связей они подразделяются на пары с 1 по 5 класса.
Рассмотрим кулисный механизм:
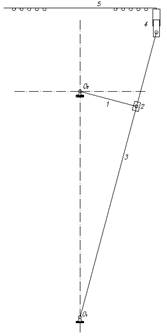
О1 – опора кулисы;
О2 – опора кривошипа;
1 – кривошип;
2 – камень кулисы;
3 – кулиса;
4 – ползун;
5 – штанга.
Представим все пары механизма
0 – 1 опора – кривошип – вращательная пара 5 класса;
0 – 3 опора – кулиса – вращательная пара 5 класса;
1 – 2 кривошип – камень кулисы – поступательная пара 5 класса;
2 – 3 камень кулисы – кулиса – поступательная пара 5 класса;
3 – 4 кулиса – ползун – поступательная пара 5 класса;
4 – 5 ползун – штанга – поступательная пара 5 класса;
5 – 0 штанга – опора – поступательная пара 5 класса.
Подсчитав число звеньев и число кинематических пар механизма, по формуле П.А. Чебышева для плоского механизма. Рассчитаем его степень подвижности.
W=3n-2p5-p4
где:
n – число всех подвижных звеньев механизма;
p5 – количество пар 5 класса;
p4 – количество пар 4 класса;
n = 5;
р5 = 7
W=3·5-2·7=1
Вывод: механизм работоспособен.
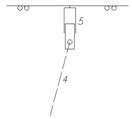 Определяем структурную группу Асура 4 – 5:
Определяем структурную группу Асура 4 – 5:
W=3·2-2·3=0
n = 2
p5 = 3
Рис1.
Отдельная группа 4 – 5 – поступательная пара 5 класса
Остаток:
 Пары:
Пары:
0 – 1 опора – кривошип – вращательная пара 5 класса;
0 – 3 опора – кулиса – вращательная пара 5 класса;
3 – 2 камень кулисы – кулиса – поступательная пара 5 класса;
1 – 2 кривошип – камень кулисы – поступательная пара 5 класса;
W=3·3-2·4=1
n = 3
p5 = 4
Определим следующую структурную группу Асура 2 – 3 камень кулисы – кулиса – поступательная пара 5 класса;
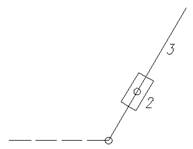
W=3·2-2·3=0
n = 2
p5 = 3
Рис2.
Остаток:
Остаток составляет ведущее звено
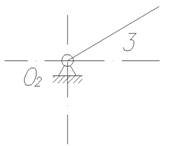 W=3·1-2·1=1
W=3·1-2·1=1
n = 1
p5 = 1
Оставшийся механизм принято называть нулевым или начальным механизмом, во всех выше указанных отдельных структурных группах (присоединяемых цепей к нулевому механизму) степень подвижности W=0. Простейшие цепи типа 3 – 2; 5 – 4 называют нормальными цепями или группами Асура.
2. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЯ РАБОЧЕГО И ХОЛОСТОГО ХОДА МЕХАНИЗМА
2.1. Задачи кинематического анализа. Исходные данные.
Кинематический анализ механизмов в общем случае предусматривает решение трех основных задач:
- определение положений звеньев и построение траекторий отдельных точек;
- определение скоростей точек и угловых скоростей звеньев;
- определение ускорений точек и угловых ускорений звеньев;
Для механизмов с одной степенью подвижности задаются законом движения одного из звеньев, обычно главного вала машины. Это звено называется ведущим.
Определение перечисленных кинематических характеристик производится в пределах одного периода (цикла) установившегося движения механизма для нескольких положений, что дает возможность с достаточным приближением решить поставленную задачу. Без знания упомянутых кинематических параметров невозможно решать дальнейшую задачу о рациональном подборе размеров. Так, например, траектории некоторых точек механизма нужны для определения хода звеньев, очертания контура машин, а также для установления соответствия движения рабочих звеньев машины правильной последовательности технологического процесса.