Теория машин и механизмовРефераты >> Технология >> Теория машин и механизмов
Принимаем ![]() = 40 мм.
= 40 мм.
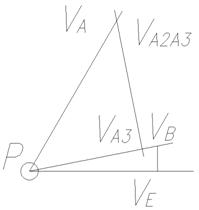
Скорость точки А3 кулисы совпадает с точкой А2 камня кулисы и определяется по уравнению:
![]()
Это уравнение основано на том, что абсолютное движение звена 2 представляется как составное из переносного движения вместе со звеном 3 и относительного движения по отношению к этому звену. Скорость VA2A3 направлена параллельно ОВ, поступательная пара, соединяющая звенья 2 и 3 допускает поступательное движение только в этом направлении. Скорость VА3 направлена перпендикулярно ОВ. Можно записать уравнение:
![]()
Скорость в точке В кулисы определяем на основе теоремы о подобии.
Построение планов скоростей Лист 1. производится следующим образом:
Из полюса Р в направлении вращения откладываем силу VA известную по величине и направлению. Силы неизвестные по величине но известные по направлению замыкают треугольник.
 Далее узнаем их истинные значения умножая на соответствующий масштаб по теореме подобия определяем скорость в точке В.
Далее узнаем их истинные значения умножая на соответствующий масштаб по теореме подобия определяем скорость в точке В.
![]()
Проводим прямую параллельную штанге (скорость будет определяться из второго треугольника и будет равна VE умноженной на масштаб.
Строим 8 планов скоростей Лист 1. результаты графического вычисления скоростей в точках А, В сводим в Таблицу 1.
0 - 
1 -  м/с
м/с
2 - ![]() м/с
м/с
3 -  м/с
м/с
4 -  м/с
м/с
5 -  м/с
м/с
6 -  м/с
м/с
7 -  м/с
м/с
Таблица 1. Значение скоростей.
|
N |
VA |
VA3 |
VA3A2 |
VВ |
VE |
|
0 - 4’ |
0,4 |
0 |
0,4 |
0 |
0 |
|
1 |
0,4 |
0,264 |
0,302 |
0,299 |
0,294 |
|
2 |
0,4 |
0,392 |
0,083 |
0,409 |
0,408 |
|
3 |
0,4 |
0,367 |
0,163 |
0,389 |
0,387 |
|
4 |
0,4 |
0,189 |
0,354 |
0,225 |
0,22 |
|
5 |
0,4 |
0,108 |
0,386 |
0,157 |
0,151 |
|
6 |
0,4 |
0,377 |
0,138 |
0,654 |
0,651 |
|
7 |
0,4 |
0,31 |
0,255 |
0,514 |
0,507 |
2.5. Построение кинематических диаграмм.
2.5.1. Построение диаграммы перемещения.
Диаграмма перемещений строится по результатам полученным в ходе решения задач на определение положения механизма в периоде одного цикла его движения.
Кинематическая диаграмма скоростей можно строить графическим дифференцированием диаграммы перемещения.
Начнем построение графика перемещения SC=SC(t). Кривошип О1А вращается с постоянным числом оборотов n=10 об/мин траекторию движения делим на 8 равных частей А; А1; А2…А7. Определяем соответствующие положения точек В; В1; В2…В7.
Первое положение т. В соответствует крайнему левому положению механизма. Положение точки В1 будем определять ее расстоянием от точки В. Строим оси координат ![]() и на оси абсцисс откладываем отрезок х который отображает время Т одного полного оборота кривошипа.
и на оси абсцисс откладываем отрезок х который отображает время Т одного полного оборота кривошипа.
Причем:
![]() (сек)
(сек)
Определяем масштаб оси абсцисс :
![]() (сек/мм)
(сек/мм)
По оси ординат масштаб остается таким же как и масштаб m l т.е. m l = mS = 0,05
После полученные точки соединяем плавной кривой.
2.5.1. Построение диаграммы скоростей.
Для построения диаграммы скоростей точки В применим метод графического дифференцирования методом хорд.
Под кривой перемещения строим кривую скоростей для этого из полюса Р взятого на расстоянии Н=33,3мм. проводим лучи параллельные хордам диаграммы перемещения. Тогда отрезки отсекаемые этими лучами с осью ординат представляют собой скорость усредненную для каждого участка. Откладываем эти отрезки в виде ординат по середине соответствующих промежутков, получаем в осях ступенчатую линию, затем плавно скругляем ее и получаем график скорости точки В.
Масштаб для данного графика принимаем:

где:
Н=33.3мм;
mt = 0.03 (сек/мм);
mS = 0,005 м/мм;
2.6. Построение планов ускорений звеньев кулисного механизма.
2.6.1. Построение плана ускорений звеньев кулисного механизма для 2 положения.
Для построения планов ускорений принимаем, что кривошип вращается с постоянной угловой скоростью, а точка А будет иметь только нормальное ускорение Wan величина которого определяется по формуле:
![]()
Wa по направлению параллельно отрезку lОА и направлено к О2
Масштаб ускорения:
Ускорения точек А1 и А2, как и их скорости, будут равны.
Движение точки А2 камня кулисы рассматриваем как сложное: вместе с кулисой (переносное) и относительно нее. Поэтому: