Расчет симметричных автоколебаний нелинейной САРРефераты >> Управление >> Расчет симметричных автоколебаний нелинейной САР
2.2. Расчет граничного значения коэффициента усиления и построение зависимости параметров периодических режимов от значений варьируемого параметра
Граничным называется минимальное значение варьируемого параметра КОС ЛЧ САУ, при котором автоколебания находятся на границе своего возникновения и исчезновения. При граничном значении КОС характеристики ЛЧ и НЭ системы автоматического управления имеют одну общую точку соприкосновения или касания (кривые WЛЧ (jw) и ZНЭ (А) имеют общую касательную).
Так как точка соприкосновения принадлежит вещественной оси координат комплексной плоскости, на которой строятся кривые WЛЧ(jw) и ZНЭ(А), то сначала найдем соответствующее значение w и Koc приравняв к нулю мнимую часть частотной передаточной функции WЛЧ(jw), а вещественную приравняем (–1). Затем из основного расчётного уравнения метода гармонического баланса при найденных значениях w и КОС найдем значение амплитуды A.
Ниже приведен листинг программы расчета w и КОС.
Решим системы уравнений (4) и (5). В результате решения указанных уравнений определим амплитуду А, частоту w и граничное значение коэффициента КОС ЛЧ. При заданных значениях параметров САУ существует точка соприкосновения WЛЧ(jw) и ZНЭ(A). При этом амплитуда А=B, частота w=wp , а граничное значение коэффициента обратной связи ЛЧ можно найти из основного расчетного уравнения
(1). Он равен КОС = 0.1105. В этом случае амплитуда А=B.
Результаты расчета граничного коэффициента ОС ЛЧ и соответствующих ему параметров приведены в таблице 2. Зависимости параметров периодических режимов от различных значений варьируемого параметра, в том числе и граничного, приведены в таблице 1 и таблице 2.
Таблица 2.
| A | 1.797 |
| w | 0.5876 |
| KOC | 0.1105 |
Графики зависимости амплитуды А и частоты w от значения варьируемого параметра КОС изображены на рис. 4 и рис. 5.
Рис.4. Зависимость А(к)
Рис.5. Зависимость w(к)
3.Цифровое моделирование системы и получение временной диаграммы ее переходного процесса на ЭВМ. Построение проекции фазовой траектории.
Моделирование заданной нелинейной системы производится с помощью ППM MATLAB6.0. Структурная схема системы представлена на рисунке 6.
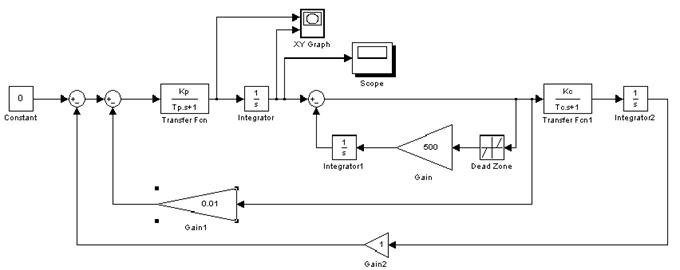
Рис. 6. Структурная схема.
В этом пакете применяется структурный метод моделирования, когда каждое звено САУ моделируется соответствующим функциональным блоком. Каждому функциональному блоку схемы моделирования присваивается свой номер и составляется спецификация её структуры и параметров.
Временные диаграммы будем снимать с помощью блока Scope, а фазовые траектории с помощью блока XY Graph.
При Кос=0 ,А = 0,5 получим следующие характеристики и траектории.
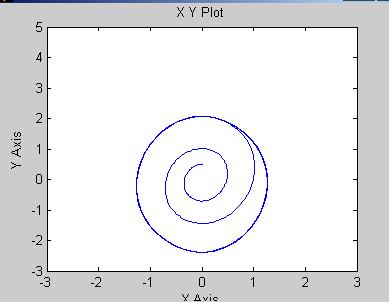
Рис.7. Фазовая траектория при Кос=0, А = 0,5.
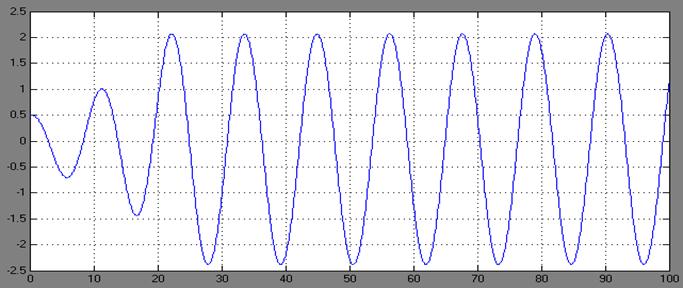
Рис.8. Временная характеристика при Кос=0, А = 0,5.
Фазовая траектория (рис.7) наматывается на устойчивый предельный цикл, что соответствует также устойчивому характеру автоколебаний с постоянной амплитудой (рис.8).
При Кос=0,05 ,А = 0,1 получим следующие характеристики и траектории.
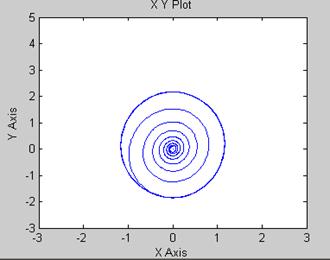
Рис.9. Фазовая траектория при Кос=0,05 ,А = 0,1.
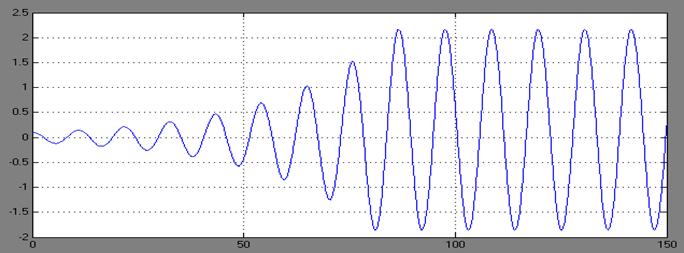
Рис.10. Временная характеристика при Кос=0,05 ,А = 0,1.
Фазовая траектория (рис.9) наматывается на устойчивый предельный цикл, что соответствует также устойчивому характеру автоколебаний с постоянной амплитудой (рис.10).
При А = 4, Кос = 0,12 получим следующие характеристики и траектории.
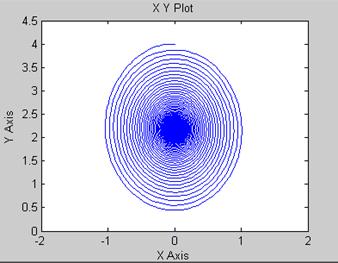
Рис.11. Фазовая траектория при А = 4, Кос = 0,12.
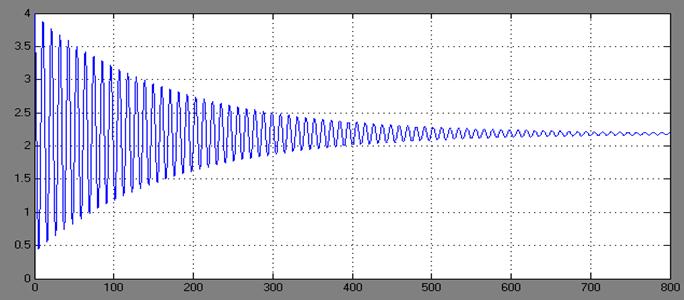
Рис.12. Временная характеристика при А = 4, Кос = 0,12.
Фазовая траектория (рис.11) имеет вид сходящегося процесса, что соответствует устойчивому процессу колебаний с уменьшением их амплитуды (рис.12). Процесс уменьшения амплитуды происходит за длительное время что характеризует Кос как близкий к граничному значению.
При А = 4, Кос = 0,3 получим следующие характеристики и траектории.
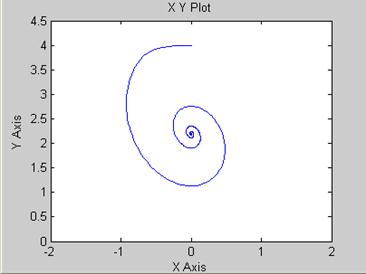
Рис.13. Фазовая траектория при А = 4, Кос = 0,3.
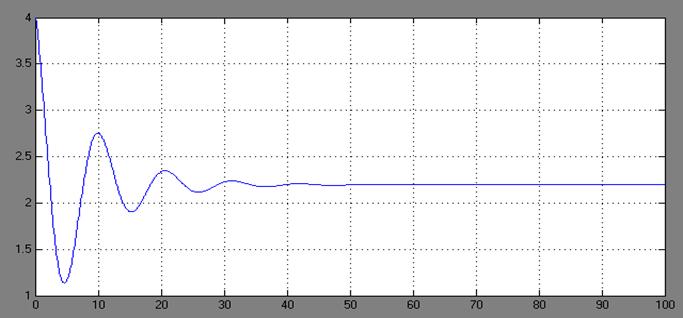
Рис.14. Временная характеристика при А = 4, Кос = 0,3.
Фазовая траектория (рис.11) имеет вид сходящегося процесса, что соответствует устойчивому процессу колебаний с уменьшением их амплитуды (рис.12). Процесс уменьшения амплитуды происходит за короткое время, что характеризует Кос как сильно отличающийся от граничного значения.
Как видно из полученных графиков (рис.9 - рис.14) наилучшая область варьируемого параметра КОС находится в пределах значений от 0 до 0,11. Так как в этой области наблюдаются колебания с малой частотой и амплитудой близкой по величине к зоне нечувствительности нелинейного элемента типа «упор».
Сведём в таблицу данные полученные при моделировании.
Таблица 3.
| № | Кос | А | w | Тр | Тс | Кр | Кс |
| 1 | 0 | 2,2 | 0,53 | 0,2 | 0,2 | 1,25 | 0,28 |
| 2 | 0,05 | 2,1 | 0,56 | ||||
| 3 | 0.12 | ||||||
| 4 | 0.3 |