Расчет симметричных автоколебаний нелинейной САРРефераты >> Управление >> Расчет симметричных автоколебаний нелинейной САР
При Кос = 0 и Кос = 0,05 начальные значения выбирались соответственно А=0,5 и А=0,1. Данный выбор обусловлен тем, что переходный процесс имеет плавно раскручивающийся вид. При Кос = 0 установившиеся автоколебания наблюдаются после двух периодов, т.к. А=0,5 , а при Кос = 0,05 и меньшем значении А=0,1 установившиеся автоколебания появляются после 7-8 периодов.
4. Выводы по работе
В данной курсовой работе исследовалась нелинейная система автопилота горизонтального руля. Проводился расчет симметричных автоколебаний и их параметров. По итогам теоретических расчетов проводилось цифровое моделирование системы.
В исследуемой системе, в зависимости от варьируемого параметра (КОС), наблюдались устойчивые, либо сходящиеся автоколебания.
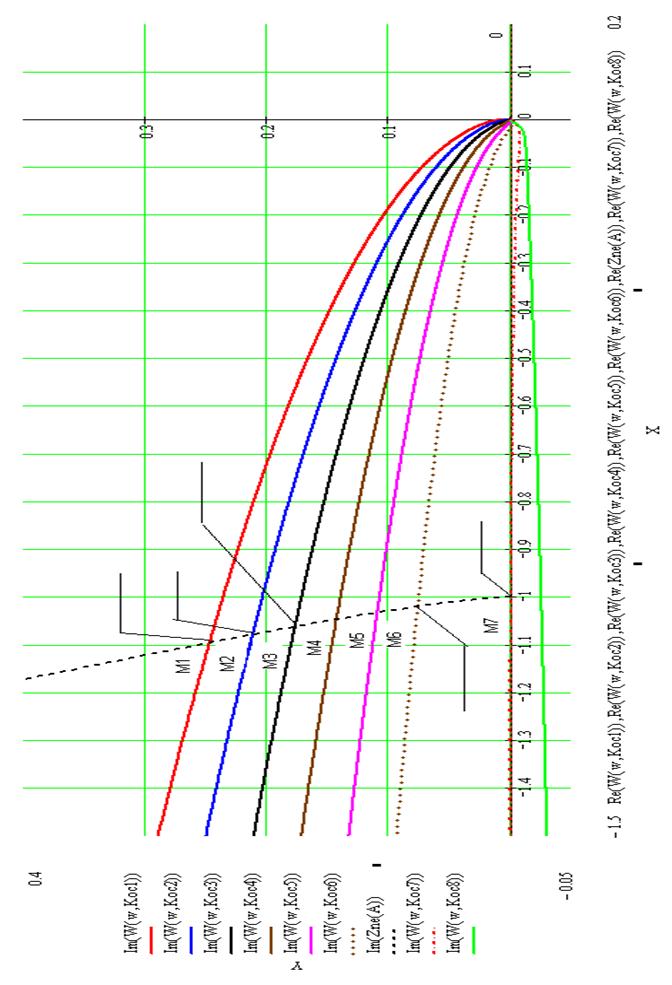
При значении 0≤КОС<0.1105 в системе наблюдаются устойчивые симметричные автоколебания, что подтверждают проделанные расчеты и цифровое моделирование. Для практического применения наилучшая область варьируемого параметра КОС находится в пределах значений от 0 до 0.111. Так как в этой области наблюдаются колебания с малой частотой и амплитудой близкой по величине к зоне нечувствительности нелинейного элемента типа «упор».
При значении КОС больше 0.11 в системе наблюдаются сходящиеся автоколебания. Данный режим неприемлем для практического применения.
Моделирование системы выполнялось с помощью ППП MATLAB. При моделировании системы при значении варьируемого параметра, лежащего в пределах от 0 до 0.1105 в системе наблюдались устойчивые симметричные автоколебания, что наглядно представлено на рисунках 7 - 10. При моделировании системы со значениями варьируемого параметра, лежащими в пределах от 0.111 и выше, в системе наблюдались сходящиеся автоколебания, что наглядно представлено на рисунках 11 – 14.
Параметры автоколебаний, полученные в результате моделирования, подтвердили результаты сделанного расчета.
Список литературы
1. Теория автоматического управления: Учеб. для ВУЗов: в 2 ч. /Под ред. А.В. Нетушила. М.:Высш.шк., 1983. Ч.2.432 с.
2. Методические указания к курсовой работе по дисциплине «Теория автоматического управления» – Савин М.М., Пятина О.Н., Елсуков В.С. - НГТУ Новочеркасск 1994г.
3. Теория автоматического управления: Учеб. для ВУЗов: в 2 ч. /Под ред. А.А. Воронова. М.:Высш.шк., 1986. Ч.2.504
4. Конспект лекций по курсу «Теория автоматического управления» Часть 2.
Приложение.