Разработка методов анализа деформаций подземных сооружений
Аналогичная ситуация сложилась и при анализе результатов наблюдений за деформациями колец туннеля. По результатам угловых и линейных измерений вычисляют координаты нескольких точек по периметру тоннеля в условной системе координат, а затем вычисляют положение аппроксимирующей окружности под условием:
 , (9)
, (9)
где Δi – отклонение радиуса аппроксимирующей окружности от реального расстояния от оси тоннеля до обделки.
Целевая функция (9) позволяет вычислить интересующие параметры тоннеля, но не допускает учета точностных характеристик измеренных величин, и невозможно воспользоваться алгоритмом Гаусса для оценки точности вычисленных параметров тоннеля. К сожалению, целевая функция (9) нашла неоправданно широкое применение при решении инженерно-геодезических задач, несмотря на ее откровенные недостатки. Автором разработана методика обработки результатов измерений при наблюдениях за деформациями колец тоннеля с использованием целевой функции (8) при сохранении возможности выполнения оценки точности всех вычисляемых параметров тоннеля.
Обычно метод решения задачи в геодезии состоит из самостоятельных этапов.
Этап 1. Формулировка основной цели работы.
Выполнить анализ деформаций колец тоннеля c заданной средней квадратической ошибкой 3 мм. Под термином "деформация колец тоннеля" может подразумеваться: отклонение размеров тоннеля от проектного; отклонение размеров тоннеля от вероятнейшей окружности.
При анализе отклонений размеров тоннеля от проектного значения все проектные размеры при обработке входят как константы, и к ним не требуется вычислять поправки. В зависимости от поставленной задачи могут встречаться оба варианта анализа деформаций. В большинстве случаев в инженерно-геодезической практике задается несколько точностных характеристик, например, допуск на радиус тоннеля и допуск на отклонение от вероятнейшего радиуса тоннеля. В таком случае целесообразнее вычислять действительный размер собранного тоннеля. В дальнейшем примере будем рассматривать именно этот вариант, как наиболее характерный.
Этап 2. Выбор метода измерений, который решает поставленную задачу.
Одновременно с выбором метода измерений необходимо записать математические зависимости между измеряемыми и вычисляемыми величинами (в данном случае деформационные характеристики колец тоннеля). Строгая математическая зависимость между измеряемыми и вычисляемыми величинами полностью исключает дальнейший выбор каких-либо иных "независимых параметров". В том случае, если измеряемые и вычисляемые величины связаны нелинейными уравнениями, то приведение данной функции к линейному виду возможно лишь в том случае, если удастся найти приближенные значения именно вычисляемых величин, и в таком случае нет места другим "независимым параметрам".
Этап 3. Предварительная оценка точности с использованием метода наименьших квадратов, по результатам оценки точности выбор метода измерений, а также обоснование точности полевых измерений.
Этап 4. Полевые измерения.
Этап 5. Обработка результатов полевых измерений, вычисление уравненных значений искомых величин с оценкой их точности.
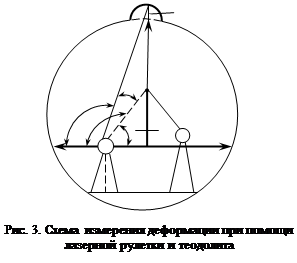 Процесс измерения заключается в следующем. В некоторой точке А устанавливают инструмент и измеряют углы наклона βi, и расстояние Si до стенок тоннеля в нескольких точках, расположенных в вертикальной плоскости, перпендикулярной оси тоннеля. Зная проектные размеры тоннеля и выполнив дополнительные измерения можно определить приближенные координаты оси тоннеля относительно оси теодолита (рис.3) со средней квадратической ошибкой 3 - 4 см.
Процесс измерения заключается в следующем. В некоторой точке А устанавливают инструмент и измеряют углы наклона βi, и расстояние Si до стенок тоннеля в нескольких точках, расположенных в вертикальной плоскости, перпендикулярной оси тоннеля. Зная проектные размеры тоннеля и выполнив дополнительные измерения можно определить приближенные координаты оси тоннеля относительно оси теодолита (рис.3) со средней квадратической ошибкой 3 - 4 см.
Используя полярные координаты Si и βi и их точностные характеристики, необходимо вычислить положение оси тоннеля, радиус тоннеля и деформационные характеристики тоннеля с объективной оценкой точности. Как видно из рис.4, уравнения, которые связывают измерения и интересующие нас величины, имеют вид:
![]() ,(10)
,(10)
гдеR – радиус тоннеля; Δi – отклонение фактического положения стенок тоннеля от окружности; Si - расстояние от прибора до наблюдаемой точки; X – расстояние от прибора до центра тоннеля по оси Х; Y – расстояние от центра тоннеля до горизонтальной оси прибора по оси Y; φi – угол между направлением на центр тоннеля и наблюдаемой точкой. Учитывая, что
![]() ; (11)
; (11)
![]() ,(12)
,(12)
где α – угол между горизонтом инструмента и направлением на центр тоннеля;
![]() , если
, если ![]() ,(13)
,(13)
где βi – измеренный угол между горизонтом инструмента и визирным лучом на точку I и![]() , если
, если ![]() . (14)
. (14)
При этом необходимо выбрать знак координат X и Y. В дальнейшем будем считать величину Y положительной, если центр прибора расположен ниже оси тоннеля, X – величиной положительной, если центр прибора расположен слева от оси тоннеля, как показано на рис.3.
Уравнению (10) будут удовлетворять лишь уравненные значения, причем измеренные или приближенно известные величины (далее выделены их волнистой чертой сверху) и уравненные связаны следующими равенствами:
![]() .
.
С учетом этих представлений приведем уравнение (10) к линейному виду относительно поправок в измеренные величины, но в начале определим зависимость между поправками в βi и φi. С учетом (12) из уравнений (13) и (14) получим:
![]() , если
, если ![]() ; (15)
; (15)
![]() , если
, если ![]() . (16)
. (16)
В свою очередь, поправку Vγ получим из уравнения (11), представив его в виде:
![]() ,(17)
,(17)
где![]() . (18)
. (18)
Следовательно,
![]() при α > βi,(19)
при α > βi,(19)
![]() при α < βi. (20)
при α < βi. (20)
Запишем уравнение (10) через измеренные значения и поправки к ним:
 (21)
(21)
Разложим уравнение (21) в ряд Тейлора и, полагая, что искомые поправки достаточно малы, ограничиваясь первыми членами разложения, с учетом (19) и (20) при α > βi получим:
 (22)
(22)