Разработка методов анализа деформаций подземных сооружений
а при α < βi:
 (23)
(23)
Введем обозначения: при α > βi:

при α < βi: ![]()
остальные коэффициенты остаются без изменений.
С учетом принятых обозначений условные уравнения примут вид:
![]() . (24)
. (24)
|
Таблица 1 | |||
|
№ п/п |
βi |
Si, см |
φi |
|
1 |
0º00'00" |
188,5 |
159º56'38" |
|
2 |
30º00'00" |
209,7 |
129º56'38" |
|
3 |
60º00'00" |
234,7 |
99º56'38" |
|
4 |
90º00'00" |
266,0 |
69º56'38" |
|
5 |
120º00'00" |
302,8 |
39º56'38" |
|
6 |
150º00'00" |
323,8 |
90º56'38" |
|
7 |
180º00'00" |
318,0 |
20º03'22" |
Измеренные значения углов βi и расстояний от дальномера до стенок тоннеля Si, представлены в табл.1.
Зная проектное значение радиуса тоннеля R = 255 см, высоту пола h1 и высоту инструмента h2, можно вычислить приближенное значение величины
![]() :
: ![]() .
.
В нашем случае h1 + h2 = 232 см, следовательно, ![]() = 23 см. В соответствии с ранее принятым расположением осей координат, величину
= 23 см. В соответствии с ранее принятым расположением осей координат, величину ![]() вычислим по горизонтальным расстояниям S1 и S7:
вычислим по горизонтальным расстояниям S1 и S7:
![]() . (25)
. (25)
Из табл.1 находим, что S1=188,5 см, S7=318,0 см, следовательно,
![]() =64,8 см.
=64,8 см.
По приближенным координатам оси инструмента вычисляется угол ![]() :
:
 и углы
и углы ![]() .
.
Затем вычисляются коэффициенты аij. по приведенному выше алгоритму.
Известно, что деформации колец тоннеля – величины сравнительно малые, и в первом приближении примем ![]() со средней квадратической ошибкой 3 – 4 см. На примере расчета далее показано, что такой подход позволяет вычислить необходимые деформационные характеристики, однако у него имеются и некоторые недостатки. При уравнивании результатов измерений подобных схем измерений под условием (8), поправки к приближенным отклонениям фактического положения стенок тоннеля от окружности, по сути, являются собственно отклонениями, так как принято, что
со средней квадратической ошибкой 3 – 4 см. На примере расчета далее показано, что такой подход позволяет вычислить необходимые деформационные характеристики, однако у него имеются и некоторые недостатки. При уравнивании результатов измерений подобных схем измерений под условием (8), поправки к приближенным отклонениям фактического положения стенок тоннеля от окружности, по сути, являются собственно отклонениями, так как принято, что ![]() . Далее рассмотрен иной подход к обработке результатов измерений.
. Далее рассмотрен иной подход к обработке результатов измерений.
По приближенным координатам оси инструмента вычислим угол
![]() :
: ![]() и углы
и углы![]() , которые отражены в табл.1 (φi).
, которые отражены в табл.1 (φi).
Найдем невязки li по формуле:
 и затем представим их в виде матрицы L.
и затем представим их в виде матрицы L.
Составим матрицу обратных весов, используя средние квадратические ошибки, ![]() , где элементами симметричной диагональной матрицы М размером 24×24 являются следующие средние квадратические ошибки: mx,y = 3 см, mΔ= 3 см, mS = 0,3 см, mβ = 20", mR = 3 см.
, где элементами симметричной диагональной матрицы М размером 24×24 являются следующие средние квадратические ошибки: mx,y = 3 см, mΔ= 3 см, mS = 0,3 см, mβ = 20", mR = 3 см.
Вектор коррелат рассчитывается по формуле:
![]() .
.
Вектор поправок найдем по формуле: ![]() .
.
Известно, что деформации колец тоннеля – величины сравнительно малые, и в первом приближении примем Δi = 0 со средней квадратической ошибкой 3 – 4 мм. Получив поправки V, можно найти фактическое положение стенок и радиуса тоннеля, по формулам (15). В итоге получен вектор поправок Vi (поправки в линейные величины выражены в сантиметрах, а в угловые – в секундах). После определения поправок в измеренные величины, найдено фактическое положение стенок и радиус тоннеля по формуле (15). (Численные значения в автореферате не приводятся).
Выполненный анализ точности результатов уравнивания показал, что величины деформаций колец тоннеля получены со средней квадратической ошибкой 3 мм, а координаты реального положения оси тоннеля – со средней квадратической ошибкой 1,9 мм, как и величина вероятнейшего радиуса.
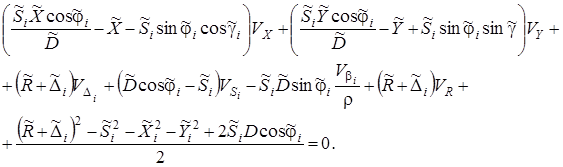
Далее в диссертации разработан второй метод определения деформаций стенок тоннеля с одновременным вычислением вероятнейшей окружности. В данном методе рассмотрены результаты измерений полярных координат (углов и расстояний) с одной стоянки электронного тахеометра. В данном случае целесообразно представить функцию (10) в следующем виде:
![]() . (26)
. (26)
Равенство (26) будет удовлетворено лишь в случае, если все величины будут уравнены.
Измеренные величины представим в виде:
![]() где волнистой чертой сверху отмечены измеренные, либо приближенно известные величины.
где волнистой чертой сверху отмечены измеренные, либо приближенно известные величины.
Величины деформаций в первом приближении известны ![]() , как величины малые, следовательно, поправки к ним будут собственно смещениями наблюдаемых точек от вероятнейшей кривой:
, как величины малые, следовательно, поправки к ним будут собственно смещениями наблюдаемых точек от вероятнейшей кривой: ![]() .
.
Представим величины, характеризующие положение вероятнейшей окружности, в виде
![]() где величины
где величины ![]() являются дополнительными неизвестными. В таком случае уравнение (26) имеет вид:
являются дополнительными неизвестными. В таком случае уравнение (26) имеет вид: