Автоматизация линии раздачи кормов в свинарникеРефераты >> Ботаника и сельское хоз-во >> Автоматизация линии раздачи кормов в свинарнике
Из анализа весового состояния видно, что схему можно реализовать без дополнительных элементов.
Из структурной теории релейных устройств известна следующая структурная формула для определения первоначальной структуры элемента Х:
![]() ,
,
где fср(х) − логическое произведение контактов элементов в такте отпускания, обеспечивающих замкнутую цепь элемента, для которого определяется структурная формула(контакт элемента в fср не входит).
fотп(х) − логическое произведение контактов элементов в такте отпускания, обеспечивающих замкнутую цепь элемента, для которого определяется структурная формула (контакт элемента в fотп не входит).
![]() .
.
Используя закон де Моргана преобразуем полученное выражение.
![]() .
.
Для упрощения первоначальных структурных формул элемента можно воспользоваться таблицей покрытий. Она позволяет исключить из первоначальной структурной формулы лишние слагаемые, которые либо не реализуют какие-либо такты или реализуют их с помощью дополнительных слагаемых структурной формулы.
Таблица 5.2 – Таблица покрытий ИЭ Х1
|
№ |
Цепь |
Такты | |||||
|
4 |
5 |
6 |
7 |
8 |
9 | ||
|
1 |
|
X |
X |
– |
– |
– |
– |
|
2 |
|
– |
X |
– |
– |
– |
– |
|
3 |
|
– |
X |
X |
X |
– |
– |
|
4 |
|
– |
X |
X |
X |
– |
– |
|
5 |
|
– |
X |
X |
X |
X |
– |
|
6 |
|
– |
X |
X |
X |
X |
X |
![]() .
.
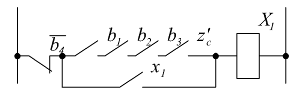
Рисунок 5.1 – Структурная схема управления ИЭ Х1
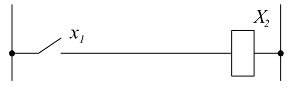
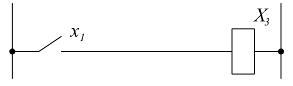
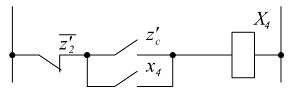
Проводим аналогичные операции и расчеты для остальных элементов. Структурные формулы и схемы включения для этих элементов сведем в таблицу 5.3.
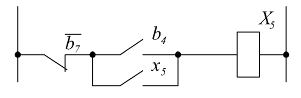
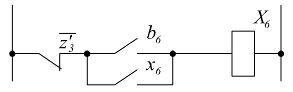
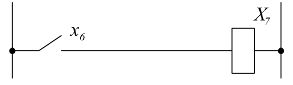
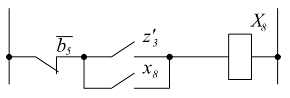
Таблица 5.3 - Структурные формулы и схемы включения
|
Элемент |
Структурная формула |
Схема включения |
|
X2 |
|
|
|
X3 |
|
|
|
X4 |
|
|
|
X5 |
|
|
|
X6 |
|
|
|
X7 |
|
|
|
X8 |
|
|
|
Z2 |
|
|
|
Z3 |
|
|

На основании полученных частных структурных схем всех элементов составим полную структурную схему управления технологическим процессом. При ее составлении произведем минимизацию схемы управления.
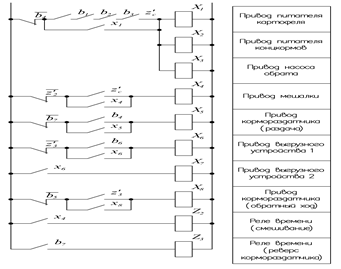
Рисунок 5.2 – Полная структурная схема управления технологическим процессом
Так как управление технологической линией осуществляется контроллером, произведем разработку программы управления.
Приведем пример представления принципиальной схемы ИЭ, выраженной во включении X1, X2, X3.
Составим таблицу входов выходов для программы управления элементами X1, X2, X3.:
Таблица 5.4 – Таблица входов выходов для программы управления элементом X1, X2, X3.
|
вход |
сигнал |
выход |
сигнал |
|
I 01 |
Датчик уровня b3 |
O 01 |
K1(привод питателя картофеля) |
|
I 02 |
Датчик уровня b1 |
O 02 |
K2(привод питателя концкормов) |
|
I 03 |
Датчик уровня b2 |
O 03 |
K3(привод насоса обрата) |
|
I 04 |
Датчик уровня b4 |