Разработка системы автоматического регулирования давления в сети нефтепроводаРефераты >> Технология >> Разработка системы автоматического регулирования давления в сети нефтепровода
Рассчитаем мощность ПЧ, с учётом КПД электродвигателя.
|
|
(1.14) |
 ,
, где Pmax – мощность электродвигателя в режиме максимальной подачи нефтепровода при максимальной скорости вращения насоса, Вт;
ηдв. – КПД электродвигателя.
|
|
 кВт.
кВт. Требуемую полную мощность ПЧ найдём по следующей формуле:
|
|
(1.15) |
|
|
Из каталога наиболее близкий схемному решению, рассмотренному в подразделе 1.3, преобразователь частоты – это Siemens Simovert MV 6SE8015-1DA01, основные характеристики которого, согласно [13], вынесены в табл. 1.3, где Tо – средняя наработка на отказ, Tсл.ср.сп. – полный средний срок службы до списания согласно [14].
Таблица 1.3
Технические характеристики преобразователя частоты
|
Uн, В (выходное) |
Uном, В (входное) |
Sном, кВА |
Iном, А |
Tсл.ср.сп, г |
Tо , ч |
ηн, % |
Вес, кг |
|
10000 |
10000 |
1500 |
145 |
10 |
24000 |
97,5 |
5600 |
Диапазон изменения выходной частоты: 0 – 66 Гц. Охлаждение – воздушное с расходом воздуха 2,2 м3/с.
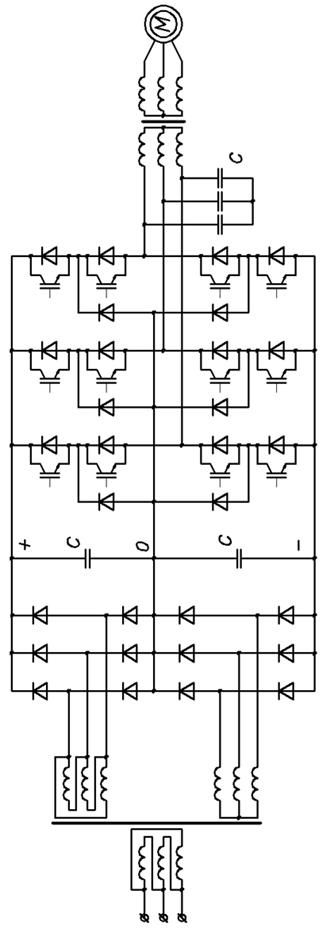
Принципиальная схема ПЧ представлена на рис. 1.9.
|
|
Рис. 1.9. Принципиальная схема преобразователя частоты |
1.4.5. Пуск и останов магистрального насосного агрегата
Пуск и останов асинхронного двигателя с заданным темпом можно обеспечить, используя возможность ПЧ плавно регулировать частоту напряжения и его величину.
Схема подключения электродвигателей МНА к преобразователю частоты изображена на рис. 1.10.
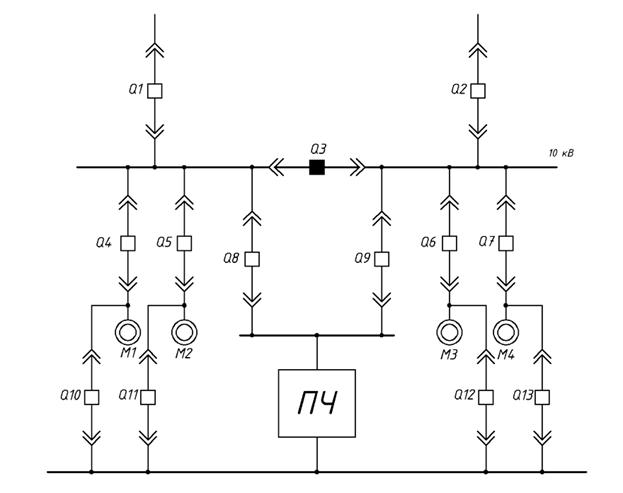
Рис. 1.10. Схема подключения электродвигателей магистральных насосных агрегатов к преобразователю частоты
Так как требуется небольшой диапазон регулирования давления, с целью снижения капитальных затрат на станции используется только один ПЧ, к которому присоединяется регулируемый электропривод. От этого же преобразователя производится последовательный пуск и останов всех остальных АД. При этом электродвигатели подключаются через высоковольтные выключатели как к секции шин ПЧ, так и к секции шин 10 кВ электроснабжения НПС. Прямой пуск используется в качестве резервного при отказе преобразователя частоты. Для регулирования давления в качестве резерва предусматривается дросселирование.
В случае необходимости остановки или пуска магистрального насосного агрегата, не подключенного в данный момент к преобразователю частоты, регулируемый асинхронный электродвигатель останавливается, либо выводится на номинальную частоту напряжения и переключается на секцию шин 10 кВ электроснабжения НПС, после чего выполняется операция пуска или останова требуемого МНА.
2. Разработка и Анализ разомкнутой системы управления электропривода магистрального насосного агрегата
Одними из требований, предъявляемых к разрабатываемой системе электропривода, как уже указывалось выше, являются обеспечение мягкого пуска с моментом, незначительно превышающим номинальный, плавное регулирование скорости с постоянным ускорением, стабильность давления на нагнетании и всасывании станции, с ограничением соответственно максимального и минимального давления. Реализацией данных требований занимается система управления электропривода.
Для синтеза системы управления электропривода с требуемыми параметрами рассмотрим вначале переходные процессы в разомкнутой системе ПЧ – АД – ЦН – МН при ρmax:
– пуск МНА (при одном работающем ЦН) до максимальной скорости при выводе НПС на максимальную производительность;
– повышение давления на нагнетании выше значения уставки при остановке МНА на следующей по ходу нефти НПС, САР должна компенсировать такое повышение давления согласно [15];
– снижение давления на всасывании ниже значения уставки на 20%;
– плавный останов МНА.
Для описания работы системы ПЧ-АД воспользуемся следующим выводом из [16]: при условии работы системы ПЧ-АД со статическим моментом меньше критического можно пренебречь электромагнитными процессами.
Для удобства математические расчёты и построение графиков будем проводить в относительных единицах. В качестве базовых величин возьмём следующие: Mн – номинальный момент электродвигателя, ω0н – скорость холостого хода электродвигателя при номинальной частоте напряжения, fн – номинальная частота напряжения, pmax – максимальное рабочее давление на выходе станции, pmin – минимальное рабочее давление на всасывании НПС.
Структурная схема разомкнутой системы управления электропривода изображена на рис. 2.1, где FH(p) – передаточная функция звена ЦН.

Рис. 2.1. Структурная схема разомкнутой системы управления электропривода
Согласно структурной схеме имеем следующие уравнения:
|
|
(2.1) |
 ,
, где ω* = ω/ω0н – относительная скорость вращения АД;
M* = M/Mн – относительный момент АД;
![]() = Mc/Mн – относительный статический момент нагрузки;
= Mc/Mн – относительный статический момент нагрузки;
λ – перегрузочная способность АД;