Расчёт и моделирование нагрузок карьерного экскаватораРефераты >> Кибернетика >> Расчёт и моделирование нагрузок карьерного экскаватора
mг – номинальная масса грунта в ковше
mро – номинальная масса рабочего механизма.
Значение величины ТР
ТР = ![]() = 0,0058 с.
= 0,0058 с.
Структурная схема механизмов копающей части имеет вид:
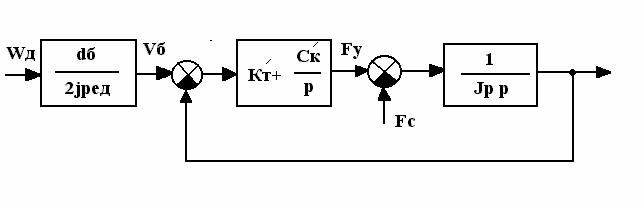
Где VP – жёсткость токи подвеса
С’К - жесткость каната при среднем положении ковша.
К’Т – среднее значение коэффициента вязкого трения в канате.
Значения С’К и К’Т берутся из (2) и равны
К’Т = 8000 ![]()
С’К = 2![]() 106
106 ![]()
Усилие в канате:
FY = К’Т ( VБ – VP) + С’К ( VБ – VP)
Составляющая тока якоря, пропорциональная упругой нагрузке (усилию в канате)
IУ = ![]()
Где МУ – момент, пропорциональный усилию в канате.
Скорость рабочего механизма, приведенного к валу двигателя:
![]() * Jред
* Jред
перемещение точки подвеса
S = ![]()
Где ![]() - угол поворота вала двигателя, соответствующий перемещению точки подвеса.
- угол поворота вала двигателя, соответствующий перемещению точки подвеса.
Подставим 1 в 2 и получим ток упругой нагрузки
IУ = К’Т ![]() С’К
С’К ![]()
Отсюда найдём приведённое значение коэффициента вязкого трения и жёсткости каната
КТ = К’Т ![]() = 8000
= 8000 ![]() = 1,6
= 1,6 ![]()
СК = С’К ![]() = 2*106
= 2*106 ![]() = 398,33
= 398,33 ![]()
Расчёт параметров двухмассовой структурной схемы для привода подъёма
Аналогично для ЭМС подъёма.
Коэффициент тиристорного возбудителя
Ктв =  =
= ![]() = 30
= 30
Коэффициент генератора:
Кг = ![]() =
= ![]() = 5,32
= 5,32
2 Uв.н. – номинальное напряжение двух последовательно соединённых обмоток возбуждения генератора
индуктивность обмотки возбуждения генератора:
Lв.н. = 2р Nв2 ![]() = 4
= 4![]() 2802
2802 ![]() = 2 Гн
= 2 Гн
Где ![]() Ф – приращение потока, соответствующее приращению потокосцепления
Ф – приращение потока, соответствующее приращению потокосцепления ![]() (I
(I![]() Nв). Значения
Nв). Значения ![]() Ф и
Ф и ![]() (I
(I![]() Nв) взяты по характеристике намагничивания генератора из «Инструкции по наладке и ремонту экскаваторов ЭГК- 8И».
Nв) взяты по характеристике намагничивания генератора из «Инструкции по наладке и ремонту экскаваторов ЭГК- 8И».
Сопротивление обмотки возбуждения генератора:
Rв.г.н. = ![]() =
= ![]() = 1,61 ом.
= 1,61 ом.
Постоянная времени цепи возбуждения генератора:
Тв.г.н. = ![]() =
= ![]() = 1,24 с.
= 1,24 с.
Эквивалентное сопротивления якорной цепи
RЭ = RЯ.Г. + RЯ.Д. = 0,024 + 0,034 = 0,058 с.
Эквивалентная постоянная времени:
ТЭ = ![]() =
= ![]() = 0,102 с.
= 0,102 с.
Электромеханическая постоянная времени:
ТМ = ![]() =
= ![]() = 0,0335 с,
= 0,0335 с,
Где JДВ. = JД+ JРЕД = 7+1=8 кг![]() м2.
м2.
Коэффициент датчика тока:
КДТ = ![]() =
= ![]() = 0,01 В/А.
= 0,01 В/А.
Коэффициент датчика напряжения:
КДН = ![]() =
= ![]() = 0,028
= 0,028
Где момент инерции рабочего оборудования, приведённого к валу двигателя равен
JР = (mро - mг ) ![]() =
= ![]() = 1,39
= 1,39
Электромеханическая постоянная времени рабочего оборудования, приведённого к валу двигателя
ТР = ![]() ,
,
Найдём приведённое значение коэффициента вязкого трения и жёсткости каната.
КТ = 
СК = 
Глава 3. Синтез системы управления.
Синтез линейных СУ ДЭМС Значительные динамические перегрузки в подъёмно-напорном механизме экскаваторов обусловлены существенной податливостью механических передач, наиболее ярко выраженной в механизмах с канатами. Естественный способ улучшения динамики ДЭМС- введение в СУ помимо обычных контуров регулирования координат двигателя дополнительных – замкнутых по координатам упругого механизма. Практически единственной такой координатой в ЭМС механизмов экскаваторов является нагрузка в упругом звене ( канате).
Очевидно- самое слабое звено в замкнутой по упругой нагрузке системе- соответствующий датчик. Поэтому нельзя считать удачным решение, состоящее в организации дополнительного последовательного контура регулирования упругой нагрузки. При отказе измерителя такая система становиться неработоспособной. Лучше в этом смысле ввести параллельную гибкую о.с. по нагрузке в обычную двухконтурную СПР. Если синтез такой системы выполнить так, чтобы и в отсутствии этой дополнительной о.с. привод сохранял приемлемые показатели качества, то обрыв её по крайней мере не скажется на работоспособности машины. Такой подход позволяет улучшить динамику ЭМС без риска повышения вероятности длительных простоев экскаватора из-за отказов привода.
Известен метод синтеза подобных систем - способ нормированных полиномов. Его применение обычно связано с решением сложной системы нелинейных уравнений. Суть состоит в том, что сперва определяются значения параметров замкнутого контура регулирования тока якоря и гибкой о.о.с. по упругой нагрузке, обеспечивающее заданное нормированным полиномом качество регулирования нагрузок в упругом звене, а затем подбирается регулятор тока, обеспечивающий требуемые параметры замкнутого контура тока якоря. Тем самым задача сводиться к простейшим вычислительным операциям.