Расчёт и моделирование нагрузок карьерного экскаватораРефераты >> Кибернетика >> Расчёт и моделирование нагрузок карьерного экскаватора
Рассчитаем ![]() - коэффициент затухания замкнутого контура тока якоря.
- коэффициент затухания замкнутого контура тока якоря.

![]()
Где:

Далее рассчитаем ТТ -- постоянную времени замкнутого контура тока якоря
![]()
Вычислим
![]()
Теперь найдём относительную статическую ошибку, вызванную действием внутренней обратной связи по ЭДС двигателя ![]() .
.
![]()
Теперь можно найти коэффициенты и постоянные времени преобразователя и регулятора.
Постоянная интегрирования:
![]()
Постоянная сглаживания:
![]()
Коэффициент пропорциональной части регулятора:
![]()
Постоянная дифференцирования:
![]()
![]()
Окончательно находим постоянную времени гибкой отрицательной обратной связи по упругому току:
![]()
Глава 4.
Моделирование нагрузок. Упрощённая кинематика подъёмно-напорного механизма ( без учёта поворота).
Электроприводы подъёма и напора экскаватора работают согласовано. Они связаны через рабочее оборудование.
Анализ движения рабочего оборудования по реальной кинематической схеме механизма – задача чрезвычайно сложная. Поэтому ниже рассматривается упрощённая кинематическая схема соответствующего рабочего оборудования. Ковш с грунтом считаем материальной точкой с массой (mK + mГ) . Рукоять считаем жёсткой балкой бесконечно малой толщины длинной Р и с равномерно распределённой массой mР . Радиусом головных блоков, установленных в верхней части стрелы, пренебрегаем.
Считаем, что платформа ЭКГ расположена горизонтально.
Тогда стрела расположена под углом ![]() к линии горизонта, соответствующим паспортному значению.
к линии горизонта, соответствующим паспортному значению.
При принятых допущениях рукоять, канат и стрела образуют треугольник. Одна из сторон треугольника длинной Q ( расстояние от точки схода каната с головного блока до подпятника рукояти ) является постоянной величиной. Две другие стороны l ( длинна каната от головного блока до точки эквивалентной массе ковша с грузом) и ![]() ( расстояние от подпятника до той же эквивалентной точки, для краткости в дальнейшем называемая вылетом рукояти) – так же показанные на рисунке, величины переменные.
( расстояние от подпятника до той же эквивалентной точки, для краткости в дальнейшем называемая вылетом рукояти) – так же показанные на рисунке, величины переменные.
Здесь же показаны направления сил подъёма и напора, принятые за положительные.
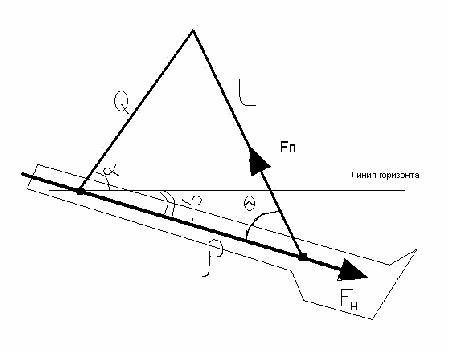
Уравнения движения можно получить различными способами. Одним из самых удобных представляется метод Лагранжа. Однако, он имеет важную особенность- координаты, в которых записываться уравнения, должны быть независимыми. В этом смысле координата ![]() подходит. А координата l нет. Поэтому в качестве второй независимой координаты принимаем угол
подходит. А координата l нет. Поэтому в качестве второй независимой координаты принимаем угол ![]() ( угол наклона рукояти к линии горизонта) показанные на рисунке.
( угол наклона рукояти к линии горизонта) показанные на рисунке.
В общем виде уравнения Лагранжа имеют вид:
Это уравнение Лагранжа второго рода. В нём Т представляет кинетическую энергию системы, ![]() и Q – обобщённая сила, отнесённая к координате
и Q – обобщённая сила, отнесённая к координате ![]() , т.е.
, т.е. ![]() представляет собой работу внешних сил системы при изменении одной из координат qi на
представляет собой работу внешних сил системы при изменении одной из координат qi на ![]() в то время, как другие координаты остаются неизменными.
в то время, как другие координаты остаются неизменными.
Qi имеет размерность силы, если qi выражает длину, Qi имеет размерность момента, если qi представляет угол и т.д.
В нашем случае Qi имеет размерность силы.
Задача составления уравнений Лагранжа и их решения для принятой нами упрощенной кинематической системы, решена в диссертации А.Ч.Хатагова под руководством К.В.Кибизова.
Полученные в ней уравнения приведены ниже:

![]() (1)
(1)
 (2)
(2)
При расчёте копания величину mГ считаем переменной.
mK , mP , mГ --- массы ковша, рукояти и груза ( грунта в ковше)
![]() -- вылет рукояти
-- вылет рукояти
P – её длинна (условная, т.е до центра тяжести ковша с грузом)
FН – усилие напора
FП – усилие подъёма
L – длинна каната от головного блока до центра массы ковша.
G – ускорение свободного падения.
Соответствующие углы показаны на рисунке:
![]() -- угол наклона стрелы к горизонту ( обычно, при ровно стоящем экскаваторе, составляет 460)
-- угол наклона стрелы к горизонту ( обычно, при ровно стоящем экскаваторе, составляет 460)
![]() -- угол наклона рукояти: он положителен, если рукоять ниже линии горизонта.
-- угол наклона рукояти: он положителен, если рукоять ниже линии горизонта.
![]() -- угол между канатом подъёма и рукоятью ( получен из рисунка)
-- угол между канатом подъёма и рукоятью ( получен из рисунка)
Однако обобщённая координата ![]() неудобна для согласования уравнений описывающих механизм с уравнениями, описывающими электропривод подъёма. Поэтому необходим переход от обобщённых координат к фактическим, однозначно зависящим от углов поворота барабанов подъёмной и напорной лебёдок. Такой переход достаточно просто реализуется решение треугольника:
неудобна для согласования уравнений описывающих механизм с уравнениями, описывающими электропривод подъёма. Поэтому необходим переход от обобщённых координат к фактическим, однозначно зависящим от углов поворота барабанов подъёмной и напорной лебёдок. Такой переход достаточно просто реализуется решение треугольника:
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
Формулы (3) и (5) получены из теоремы косинусов, а формула (4) – из теоремы синусов для треугольников.
Так как моделирование электроприводов подъёма и напора выполнялось в ПК МОДО-С, то и решение треугольника удобно выполнить в этой же программе.
Глава 5. Фильтры
В системе автоматического управления (САУ) обратной связью (ОС) экскаватора ЭКГ-8И одним из обязательно присутствующих элементов является датчик регулируемой координаты или датчик обратной связи (ДОС). Помимо «полезной» составляющей, точно соответствующей регулируемой координате, выходной сигнал ДОС содержит составляющие, искажающие это соотношение. Их соотношение в статике может быть нелинейным. Такую нелинейность при синтезе САУ относительно легко учесть введение в канал ОС соответствующего нелинейного звена.