Синтез и анализ аналоговых и цифровых регуляторовРефераты >> Кибернетика >> Синтез и анализ аналоговых и цифровых регуляторов
А(1)= ![]() >0.
>0.
(-1)4A(-1)= ![]() >0.
>0.
![]() .
.
Обратный полином:
![]() .
.
Разделим A(z) на A0(z).
|
0.78-3.326z+5.3001z2-3.756z3+ z4 |
1-3.7556z+5.3001z2-3.32z3+0.7834z4 |
|
-(0.78-2.943z+4.152z2-2.606z3+0.61z4) |
0,783447=q0, |q0|<1 |
-0,383z+1.147z2-1.1506z3+0,3861 z4
Домножим полученный результат на z-1, тогда:
A1(z)= -0,383+1.147z-1.1506z2 +0,3861 z3,
A10(z)= -0,361+1.1506z-1.147z2 +0,383 z3.
Разделим A1(z) на A10(z).
|
-0,383+1.147z-1.1506z2 +0,3861 z3 |
-0,361+1.1506z-1.147z2 +0,383 z3 |
|
-(-0,383+1.141z-1.138z2 +0,3801 z3) |
-0,992116=q1, |q1|<1 |
0,006046z-0,01207z2+0,00605z3
Домножим полученный результат на z-1, тогда:
A2(z)= 0,006046z-0,01207z2+0,00605z3,
A20(z)= 0,00605-0,005474z2-0,006046z3.
Разделим A2(z) на A20(z).
|
0,006046z-0,01207z2+0,00605z3 |
0,00605-0,005474z2-0,006046z3 |
|
-(0,006046z-0,01207z2+0,00603z3) |
0,99774=q2, |q2|<1 |
-0,000027278z+0,000027353z2
Домножим полученный результат на z-1, тогда:
A3(z) = -0,000027278z+0,000027353z2
В результате расчетов получили, что q0, q1, q2 по модулю меньше еденицы, таким образом все три неравенства выполняются. Следовательно цифровая система устойчива.
Система с ПИД-регулятором.
Характеристический полином имеет вид:
Степень полинома n=5. Множество qi = {q0, q1, q2, q3}.
А(1)=![]() >0.
>0.
(-1)5A(-1)=![]() >0.
>0.
![]() ,
,
Обратный полином:
![]() .
.
Разделим A(z) на A0(z).
|
|
|
|
|
0,01589163=q0, |q0|<1 |


0,7347z-3,1644z2+5,102835z3-3,6802818z4+0,999747z5
Домножим полученный результат на z-1, тогда:
A1(z)= 0,7347-3,1644z+5,102835z2-3,6802818z3+0,999747z4,
A10(z)= 0.99974 -3,680218z+5,1028z2-3,1644z3+0,7347z4.
Разделим A1(z) на A10(z).
|
0,7347-3,1644z+5,102835z2-3,6802818z3+0,999747z4 |
0,7347-3,1644z+5,102835z2-3,6802818z3+0,999747z4 |
|
-(0,7347-2.704z+3.750z2-2.3256z3+0.53999z4) |
0,734938361=q1, |q1|<1 |
-0,4596z+1,3255z2-1,3545z3+0,4597z4
Домножим полученный результат на z-1, тогда:
A2(z)= -0,4596+1,3255z-1,3545z2+0,4597z3,
A20(z)= -0,4597+1,3545z-1,3255z2+0,4596z3.
Разделим A2(z) на A20(z).
|
-0,4596+1,3255z-1,3545z2+0,4597z3 |
-0,4597+1,3545z-1,3255z2+0,4596z3 |
|
-0,4596-1,3244z+1,3525z2+0,4595z3 |
-0,99986442=q2, |q2|<1 |
-0,0288981z-0,02926z2+0,91927z3
Домножим полученный результат на z-1, тогда:
A3(z)= -0,0288981-0,02926z+0,91927z2,
A30(z)= 0,91927-0,02926z-0,02889881z2.
Разделим A3(z) на A30(z).
|
-0,0288981-0,02926z+0,91927z2 |
0,91927-0,02926z-0,02889881z2 |
|
0,0288981-0,0009198z+0,0.028898z2 |
0,0314359=q2, |q2|<1 |
-0,0305301z+1.028762z2
Домножим полученный результат на z-1, тогда:
A4(z)= -0,0305301+1.028762z.
В результате расчетов получили, что q0, q1, q2 по модулю меньше еденицы, таким образом все три неравенства выполняются. Следовательно цифровая система устойчива.
После того, как определили устойчивость системы по критерию Джури, необходимо построить переходный процессы в замкнутых цифровых системах.
Для построения переходных процессов в замкнутых цифровых системах воспользуемся обратным z-преобразованием.
Eсли функция имеет m-полюсов zk={z1, z2,…, zn} , то:
 , (4.13)
, (4.13)
где A(zk) – числитель функции W3(z);
B’(zk) – производная знаменателя функции W3(z);
Замкнутая система с П – регулятором.
Передаточная функция для цифровой замкнутой системы с П-регулятором имеет вид:
![]()
Переходная функция замкнутой системы равна:
 .
.
Для вычисления f[n] найдем полюса функции
![]() .
.
Полюся функции:
z1 = 1;
z2 = 0,8422;
z3 = 0,954 – j0,313;
z4= 0,954 – j0,313.
Производная знаменателя функции:
B’(z) = -11.25z2+10.574z-3.317+4z3.
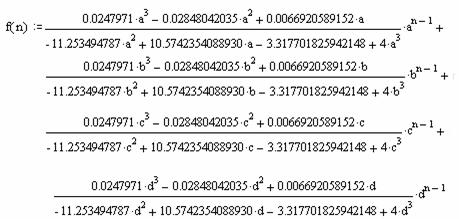
Подставим значение полюсов функции и значение производной в формулу (4.13), получим выражение для :
где a = z1;
b = z2;
c = z3;
d = z4;
Изобразим переходый процесс на рисунке 4.2
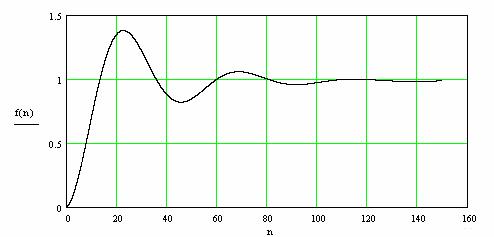
Рисунок 4.2 - Переходный процесс в системе с П – регулятором
Замкнутая система с ПИ – регулятором.
Передаточная функция для цифровой замкнутой системы с ПИ-регулятором имеет вид: