Синтез и анализ аналоговых и цифровых регуляторовРефераты >> Кибернетика >> Синтез и анализ аналоговых и цифровых регуляторов
![]() ;.
;.
Переходная функция замкнутой системы равна:
 .
.
Для вычисления f[n] найдем полюса функции
![]() .
.
Полюся функции:
z1 = 1;
z2 = 0.847;
z3 = 0.965;
z4 = 0.973 – j0.0113;
z5= 0.973 + j0.0113.
Производная знаменателя функции:
B’(z) = 5z4-19.027z3+27.171 z2-17.253z+4.110
Подставим значение полюсов функции и значение производной в формулу (4.13), получим выражение для f[n]:
где а = z1;
b = z2;
c = z3;
d = z4;
e = z5;
Изобразим переходый процесс на рисунке 4.3
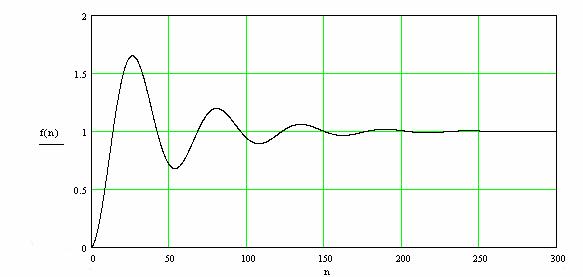
Рисунок 4.3 - Переходный процесс в системе с ПИ – регулятором
Замкнутая система с ПИД – регулятором.
Передаточная функция для цифровой замкнутой системы с ПИД-регулятором имеет вид:
![]() .
.
Переходная функция замкнутой системы равна:
 .
.
Для вычисления f[n] найдем полюса функции
![]() .
.
Полюся функции:
z1 = 1;
z2 = -0,021;
z3 = 0,84;
z4 = 0,935-j0,171;
z5= 0,935+j0,171;
z6=0,98.
Производная знаменателя функции:
B’(z) = 6z5-23.347 z4+34.893 z3-24.39 z2+7.505z-0.660
Подставим значение полюсов функции и значение производной в формулу (4.13), получим выражение для f[n]:
где а = z1;
b = z2;
c = z3;
d = z4;
e = z5;
f = z6.
Изобразим переходый процесс на рисунке 4.4
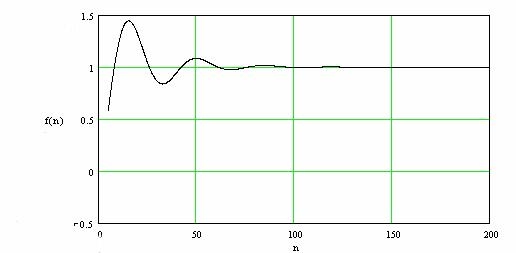
Рисунок 4.4 - Переходный процесс в системе с ПИД – регулятором.
5 Расчет цифрового фильтра
Для расчета цифрового фильтра, переводящего линейную часть из начального в конечное состояние за минимальное число периодов квантования и обеспечивающего ограничение на заданное управляющие воздействие, необходимо вычислить минимально возможный период квантования, но чтобы было удовлетворено условие:
|Um – q0|£0,05, (5.1)
где Um = 1,0.
Вычисление значения q0 следует начать с определения значений коэффициентов числителя Z-передаточной функции приведенной непрерывной части для принятого периода дискретности. Пусть Z-передаточная функция приведенной непрерывной части представима в виде:
 . (5.2)
. (5.2)
Тогда Z-передаточная функция оптимального по быстродействию цифрового фильтра Wф(z) имеет вид:
 , (5.3)
, (5.3)
где pi = biq0, i = 1,2,…,m;
qi = aiq0, i = 1,2,…,m;
 .
.
Воспользуясь формулой (4.7) для Wнч(z) . Находим функции bi , аi и Т0.
Для коэффициентов bi имеем:
![]() ; (5.4)
; (5.4)
![]() ;(5.5)
;(5.5)
![]() . (5.6)
. (5.6)
Для коэффициентов аi имеем:
![]() ; (5.7)
; (5.7)
![]() ; (5.8)
; (5.8)
![]() . (5.9)
. (5.9)
Найдем выражение для q0 :

![]() . (5.10)
. (5.10)
Определим Т0 при котором выполняется условие (5.1), для этого построим график зависимости и изибразим его на следующем рисунке 5.1.
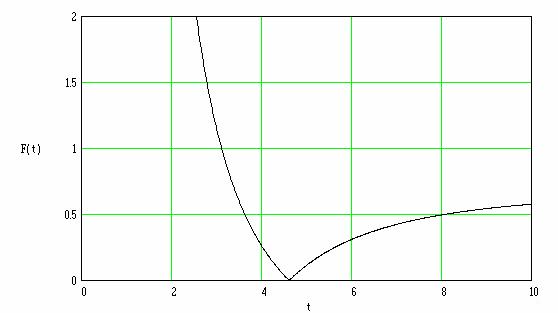
Рисунок 5.1 – График зависимости |Um – q0(Т0)|
При построении графика видим, что Т0 = 4,61 , q0(Т0) = 1,002.
Определим коэффициенты , подставив найденное значение Т0 в выражение (5.4) и (5.5):
b1(Т0) = 0,718;
b2(Т0) = 0,332;
b3(Т0) = -0,052;
a1(Т0) = -0,932;
a2(Т0) = 0,281;
a3(Т0) = -0,027;
Подставляя найденные значения в выражения (5.2) и (5.3) определим передаточные функции приведенной непрерывной части и цифрового фильтра.
 . (5.7)
. (5.7)
![]() . (5.8)
. (5.8)
Находим Z – передаточную функцию для разомкнутой цифровой системы по формуле:
Wp(z) = Wн.ч.(z) * Wф(z). (5.9)
Определим Z – преобразованную функцию замкнутой системы по каналу задание – управляюшее воздействие по формуле:
 , (5.10)
, (5.10)
Определим Z – преобразованную функцию замкнутой системы по каналу задание – выходной сигнал по формуле:
 , (5.10)
, (5.10)
Пусть f – функция определяющая зависимость между q0 от Т0, т.е. q0=f(Т0), тогда f –1 – обратная ей функция, т.е. Т0=f –1(q0). Для того, чтобы найти период квантования необходимо минимизировать функцию Т0=f –1(q0) с учетом условия (5.1).
Так как в явном виде функцию Т0=f –1(q0) вывести сложно, но из графика видно, что она монотонно убывает, следовательно минимум на отрезке q0 Î [3,45; 3,55] будет при q0=3,55.
Расчет Т0 сводится к решению уравнения
 . (5.11)
. (5.11)
Для решения данного уравнения воспользуемся алгоритмом поиска корня уравнения методом дихотомии. После решения уравнения мы получили, что
Т0 =1,25.
Подставляя значение Т0 =1,25 в выражения (5.4)-(5.9) найдем коэффициенты Z-передаточной функций приведенной непрерывной части.
Тогда
 . (5.12)
. (5.12)
При этом q0 =3,540075. Согласно формуле (5.3)
 . (5.13)
. (5.13)
Найдем Z-передаточную функцию разомкнутой цифровой системы. Она равна Wр(z)=Wнч(z)*Wф(z) и равна
![]() . (5.14)
. (5.14)
Z-передаточная функция замкнутой цифровой системы по каналу задание – управляющие воздействие равна
 (5.15)
(5.15)