Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаРефераты >> Авиация и космонавтика >> Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Для уменьшения ошибок в БСО используются, например, корпусы блока гироскопов в монолитном исполнении, в которых и размещаются двухстепенные гироскопы [21]. Это позволяет обеспечить достаточную жесткость осей, связанных с измерительными осями гироскопов, и необходимую точность ориентации этих осей. При решении задачи ориентации относительно инерциального пространства используются различного вида кинематические уравнения [1,3]. Сравнительная их характеристика показывает, что в общем случае вне конкретной схемы затруднительно отдать предпочтение как определенному виду кинематических уравнений, так и определенным параметрам угловой ориентации. Однако это не исключает рациональный выбор параметров ориентации в каждой конкретной схеме реализации БСО [9].
2.1 Бесплатформенные инерциальные навигационные системы
Развитие бескарданных (бесплатформенных) базовых систем отсчета стала вполне возможной после того прогресса вычислительной техники, который привел к появлению надежных бортовых цифровых вычислительных машин, обладающих нужным объемом памяти и достаточным быстродействием [15]. Это сделало возможным непрерывное интегрирование уравнений движения космического аппарата при сколь угодно сложном характере его движения, опираясь на показания, по сути, тех же датчиков первичной информации, что и используемые в платформах. Следовательно, в бесплатформенных системах громоздкие устройства подвеса со следящими приводами «заменяются» интегрированием уравнений движения [9, 15].
Типичная схема бесплатформенной системы управления космическим аппаратом показана на (рис 2.1). С бортовой цифровой вычислительной машиной 1 соединены три группы датчиков, условно обозначенных через Д1,
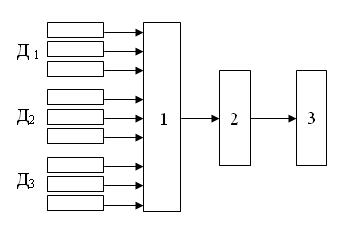
Рис 2.1 - Схема бесплатформенной системы управления ориентацией:
1 – бортовая цифровая вычислительная машина; 2 – блок согласования; 3-исполнительные органы
Д2 и Д3; вырабатываемые в машине сигналы управления преобразуются должным образом в блоке согласования 2, после чего поступают на исполнительные органы системы ориентации 3. Воздействуя на динамику космического аппарата (в зависимости от работы исполнительных органов, изменяется его угловое движение, и на входе вычислительной машины появляются измененные сигналы датчиков системы ориентации). На приведенной схеме все датчики условно разбиты на три группы в зависимости от основной задачи, выполняемой ими в полете.
Группа датчиков Д1, по сути, обеспечивает существование на борту математической «платформы». Этими датчиками могут быть любые устройства, позволяющие регистрировать составляющие p, q и r угловой скорости космического аппарата, параллельные осям Ox, Oy и Oz жестко связанного с ним триэдра осей. Имея непрерывно измеряемые значения p(t), q(t), r(t), вычислительная машина интегрирует кинематические уравнения углового движения и непрерывно определяет соответствующие три угла поворота жестко связанного с корпусом космического аппарата триэдра осей Oxyz относительно некоторого условного, например, начального положения этого триэдра Ox’y’z’. Поскольку в результате вычислений положение триэдра Oxyz всегда известно для текущего момента времени с нужной точностью, постольку известно и расположение относительно корпуса космического аппарата начального триэдра Ox’y’z’. Таким образом, триэдр Ox’y’z’, положение которого относительно корпуса непрерывно вычисляется, может служить базовой системой отсчета углов для поступательно движущихся осей ориентации; в этом смысле тройка датчиков Д1 и вычислительная машина заменяют гиростабилизированные платформы [1, 3, 9, 15].
Если необходимо иметь базовую систему отсчета для орбитальных осей ориентации при известной орбите космического аппарата, то бортовая вычислительная машина должна вычислять для каждого момента времени t, кроме уже сказанного, и положение орбитальных осей ориентации Ox”, Oy”, Oz” относительно поступательно движущихся осей Ox’, Oy’, Oz’ (эти вычисления никак не связаны с работой датчиков системы ориентации, в них используются данные об орбите космического аппарата и о взаимном положении осей Ox’, Oy’, Oz’ и Ox”, Oy”, Oz” в начальный момент времени t=0, которое предполагается известным). Поскольку в машине в этом случае есть все данные о взаимном положении триэдров Ox’y’z’ и Ox”y”z”, с одной стороны, и триэдров Oxyz и Ox’y’z’, с другой, то тем самым легко вычисляется и взаимное положение триэдров Oxyz и Ox”y”z”, т.е. углы ориентации для орбитальной системы осей [3]. В этом смысле тройка датчиков Д1 и вычислительная машина, в память которой введены параметры заданной орбиты, заменяют платформу. Совершенно аналогично можно было бы вычислять в бортовой машине и углы ориентации для скоростной системы осей, поскольку их вращение в функции времени тоже определяется параметрами орбиты [1].
Приведенные примеры указывают на большую гибкость, которую сообщает управлению ориентацией использование бортовой вычислительной машины, - переход от управления относительно поступательно движущихся осей ориентации к управлению в орбитальных или скоростных осях может производиться практически мгновенно путем простого изменения программы работы машины [12, 15].
В качестве датчиков Д1, о которых было сказано, что они являются любыми измерителями компонент угловых скоростей, могут быть использованы высокочастотные датчики угловых скоростей либо одноосные гиростабилизаторы, т.е. приборы, содержащие лишь один канал стабилизации углового положения платформы вместо трех. В рассматриваемом случае платформа не будет устанавливаться в кардановом подвесе, а будет иметь одну единственную ось вращения – ось Ox. Угол поворота платформы относительно корпуса космического аппарата вокруг этой оси обозначим через ![]() . В таком случае компонента p’ угловой скорости вращения платформы по направлению Ox относительно абсолютного пространства будет равна
. В таком случае компонента p’ угловой скорости вращения платформы по направлению Ox относительно абсолютного пространства будет равна ![]() . Если интегрирующий гироскоп и следящая система работают идеально, то
. Если интегрирующий гироскоп и следящая система работают идеально, то ![]() и ,следовательно,
и ,следовательно, ![]() , т.е. по темпу поворота платформы одноосного гиростабилизатора относительно корпуса космического аппарата можно судить о компоненте угловой скорости по соответствующей оси [9, 12].
, т.е. по темпу поворота платформы одноосного гиростабилизатора относительно корпуса космического аппарата можно судить о компоненте угловой скорости по соответствующей оси [9, 12].
Важно обратить внимание на то обстоятельство, что вращение вокруг одной оси может быть неограниченным, и поэтому недостатки, свойственные платформам в кардановых подвесах, отсутствуют [9]. Очевидно, что на борту космического аппарата надо иметь три таких одноосных гиростабилизатора с взаимно перпендикулярными осями чувствительности; образно выражаясь, для получения бескарданной базисной системы в этом случае надо «распилить» обычную гиростабилизированную платформу на три части и подсоединить их к вычислительной машине. В каком случае предпочтительно использовать датчики угловых скоростей и в каком - одноосные гиростабилизаторы – дело конкретной конструктивной проработки. Достаточно указать лишь на то, что в первом случае гироскопический элемент работает в измерительном режиме, во втором же случае – в режиме нуль-индикатора [21], что всегда проще для гироскопического элемента, хотя сам одноосный гиростабилизатор и сложнее датчика угловой скорости.