Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппаратаРефераты >> Авиация и космонавтика >> Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Для математического моделирования, будем рассматривать модель реального космического аппарата [10], с заданными линейными размерами.
 |
![]() Солнечные батареи Корпус КА
Солнечные батареи Корпус КА
Рис. 3.1.
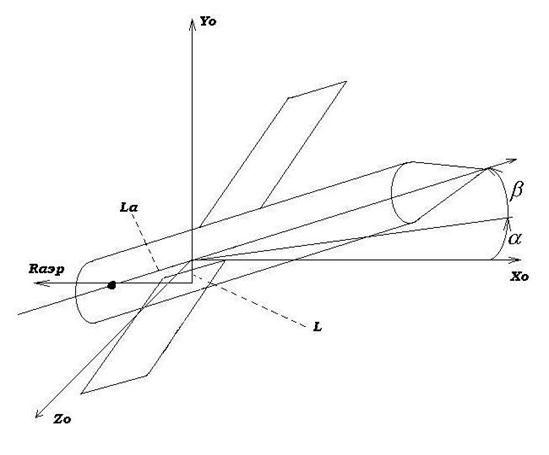
Рис. 3.2.
Исходя из выше представленной модели космического аппарата, аэродинамические моменты в каждом из каналов, можно представить в виде:
![]()
![]() (3.13).
(3.13).
![]()
3.2.1.1 Аппроксимация плотности земной атмосферы аналитическими зависимостями
Предполагается, что рассматриваемая модель упругого космического аппарата [1, 3, 10, 11] движется в атмосфере земли. Тогда на КА действуют моменты внешних сил, такие как гравитационный и аэродинамический моменты. Для нахождения аэродинамического момента, необходимо знать плотность атмосферы, которая зависит от высоты полета.
В данной задаче требуется [11, 24] аппроксимировать функцию полиномом 3-его порядка вида:
![]() ; (3.14)
; (3.14)
Полином (3.14) в каждом из узлов аппроксимации должен удовлетворять условию:
![]() ; (3.15)
; (3.15)
Таким образом, задача аппроксимации функции сводится к решению системы с N+1 уравнений с тремя неизвестными:
 ; (3.16)
; (3.16)
Это объясняется тем, что полином должен пройти через все N+1 точек (в данном случае это 25 точек) в которых задана функция x = x(t).
Метод наименьших квадратов позволяет такую систему привести к решаемой системе. Запишем функционал:
 .
.
Это достигается тогда, когда выполняется:
 ;
;
Взяв соответствующие производные, получим систему:
 ;
;
(3.17)
В отличии от системы (3.16) полученная система определена и имеет единственное решение [24].
В результате проведенных расчетов, для составления системы, были произведены расчеты, приводить которые нецелесообразно ввиду их громоздкости.
Подставив в систему (3.17) соответствующие значения, в результате мы получим систему. Эту систему будем решать методом Гаусса.
3.2.1.2 Построение аппроксимирующего полинома для плотности земной атмосферы
Воспользовавшись таблицей стандартной атмосферы [10,11], построим графики зависимостей от высоты функции Po(H):
Плотность:
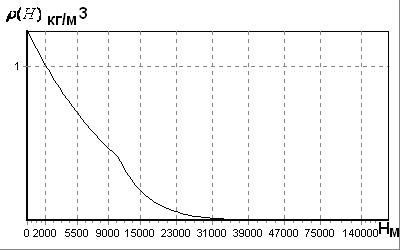
Рис. 3.3 - Зависимость плотности воздуха от высоты
Аппроксимирующий полином:

3.2.2 Гравитационный момент
В обычных задачах механики [1, 3, 6, 10, 11, 12], связанных с ее техническими приложениями, ускорения силы тяжести в различных точках материального тела считаются равными как по величине, так и по направлению. Это сразу приводит к известному положению о совпадении центра масс и центра тяжести материального тела и, как следствие, к равенству нулю момента гравитационных сил относительно центра масс. На самом деле векторы ускорения силы тяжести различных точках тела всегда различны, вследствие того, что все они направлены к центру Земли, а, следовательно, если рассматриваемые точки не лежат на одной прямой, проходящей через центр притяжения, то векторы параллельны, а если точки лежат на одной такой прямой, то – имеют различное удаление от центра притяжения и, значит, соответствующие ускорения отличаются по величине. Однако это уточнение в обычных задачах механики несущественно, поскольку размеры технических сооружений малы по сравнению с радиусом Земли, и поэтому вызванные сформулированным здесь уточненные моменты столь малы по сравнению с другими, что учет их не смысла.
Космический аппарат, движущийся по околоземной орбите [6], тоже мал по сравнению с расстоянием до центра притяжения планеты, однако он не подвержен (если не считать времени включения двигателей) действию больших внешних моментов, и поэтому пренебрежение малыми в обычной технике моментами (гравитационными, связанными со световым давлением и т. п.) уже не будет законным без соответствующей оценки этих моментов [1, 3].
Прежде, чем получить формулы для вычисления гравитационных моментов и обсудить некоторые следствия, вызванные существованием этих внешних моментов, поясним физическую сущность рассматриваемого явления па простейшем примере. Пусть в центральном ньютоновом поле сил находится тело, могущее быть представленным в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель), и пусть этот стержень будет наклонен на некоторый угол (отличный от 0 и pi/2) к линии, соединяющей его середину А с центром притяжения С (рис. 3.4).

Рис. 3.4 – Тело в виде двух одинаковых точечных масс, соединенных невесомым стержнем (идеализированная гантель) в ньютоновом поле
Если принять обычные допущения о параллельности и равенстве сил тяжести) действующих на обе массы гантели (считаем, что на них действует ускорение силы тяжести, соответствующее точке А), то связанные с ними силы G не дали бы момента относительно точки А, являющейся центром масс рассматриваемого тела. На самом деле силы тяжести будут действовать по прямым В1С и В2С, а величина силы тяжести в точке И1 будет меньше, чем в точке И2, поскольку В1С > В2С. Поэтому к “обычным” силам G, вычисленным по вектору ускорения силы тяжести, соответствующему точке А, следует ввести поправки, например малые силы P1i и P2, изменяющие должным образом величины сил тяжести, действующий на материальные точки, и силы P1 и Р2, изменяющие должным образом направления этих сил тяжести. Из рисунка видно, что пара сил R1 и R2 и пара сил P1 и Р2 (их можно считать 'парами, постольку малые силы Р1 и Р2, а также R1 и R2 будут отличаться друг от друга на .величины высшего порядка малости) создают моменты одного знака, стремящиеся совместить ось тела B1B2 с исправлением АС.
Таким образом, как зависимость величины ускорения силы тяжести от расстояния до центра притяжения, так и центральность поля тяготения приводят к эффектам одного типа - к появлению моментов, стремящихся повернуть ось тела, связанную с геометрией распределения масс в нем, в некоторое определенное положение относительно прямой, соединяющей центр масс тела с центром притяжения.