Билеты госэказаменаРефераты >> Технология >> Билеты госэказамена
обременять конструктора сложным инструментом поверхностного моделирования, в математическом аппарате пакетов твердотельного моделирования реализованы некоторые упрощенные функции построения поверхностей по образующим линиям. Эти поверхности преобразуются в тела ограниченного объема и могут использоваться в топологических операциях с телами. Например, из любого твердого тела можно вычесть объем, ограниченный поверхностью. Осуществляется эта операция после преобразования поверхности в тело: часть полупространства, ограниченная поверхностью, указывается как объем, принадлежащий поверхности и участвующий в вычитании.
Большинство машиностроительных деталей строится с использованием сложных формообразующих контуров. Конструктору предлагается обширный инструментарий создания и редактирования двумерных примитивов (прямых, дуг, окружностей, многоугольников и т.д.) и сложных контуров.
2. Конструкции и расчет узлов механической системы ПР. Узлы рук, узлы вращения и прямолинейного перемещения.
 При проектировании механической системы робота из-за необходимости учитывать разнообразные факторы и выбирать приемлемые решения при большом числе ограничений и взаимоисключающих требований, например обеспечение высокой точности позиционирования и динамики движения в сочетании с большим объемом рабочей зоны и малыми значениями материале и энергоемкости и себестоимости изготовления. Часто поиск удовлетворительного решения ограничивается также технологическими возможностями производства роботов и уровнем имеющихся комплектующих изделий. Поэтому методика проектирования механической системы должна базироваться на анализе функций ее элементов и их взаимосвязи с технологическими требованиями и техническими возможностями. Механическую систему робота, по аналогии с человеком, подразделяют на две подсистемы: скелетную, или несущую, механическую систему (НМС); мышечную, или исполнительную, систему (ИС).
При проектировании механической системы робота из-за необходимости учитывать разнообразные факторы и выбирать приемлемые решения при большом числе ограничений и взаимоисключающих требований, например обеспечение высокой точности позиционирования и динамики движения в сочетании с большим объемом рабочей зоны и малыми значениями материале и энергоемкости и себестоимости изготовления. Часто поиск удовлетворительного решения ограничивается также технологическими возможностями производства роботов и уровнем имеющихся комплектующих изделий. Поэтому методика проектирования механической системы должна базироваться на анализе функций ее элементов и их взаимосвязи с технологическими требованиями и техническими возможностями. Механическую систему робота, по аналогии с человеком, подразделяют на две подсистемы: скелетную, или несущую, механическую систему (НМС); мышечную, или исполнительную, систему (ИС).
Следует отметить, что подход и объем задач при их проектировании различен из-за разных функциональных требований. Несущая механическая система обеспечивает рабочую зону робота, его жесткость и служит для установки элементов исполнительной системы. Исполнительная система обеспечивает перемещение звеньев НМС с заданными динамическими параметрами: ускорением, точностью, скоростью. Несмотря на достаточно большие различия в функциях НМС и ИС, они достаточно тесно связаны между собой, оказывают значительное влияние на конструктивное исполнение друг друга и их элементы входят в модули роботов. На конструкцию рук и их кинематическую схему влияют число степеней подвижности ориентирующего механизма кисти, компоновка робота, тип применяемого привода, требования к погрешности позиционирования, вибро- и теплостойкости.
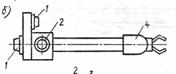
Механизмы рук, работающих в угловой системе координат, выполняются в виде шарнирно закрепленного рычага, на переднем торце которого установлен ориентирующий механизм кисти 4, а на заднем — приводы ориентирующего механизма 1. На корпусе руки устанавливаются цапфы вращения руки 2. Механизмы рук, работающих в цилиндрической, сферической и прямоугольной системах координат, выполняют в виде направляющей прямоугольной или корытооразной формы, которая базируется на опорах в корпусе руки. При расположении привода на заднем торце направляющей руки его связь с ориентирующим механизмом осуществляется через параллельно или соосно расположенные трансмиссионные валы. Такая компоновка по сравнению с компоновкой с расположением привода на корпусе руки характеризуется повышенным моментом инерции относительно оси поворота и большими габаритами руки, но обеспечивает максимальную простоту конструкции.
При проектировании механизмов вращения надо придерживаться такой последовательности. 1. Определить усилия, действующие на выходное звено механизма вращения. 2. Выбрать тип привода. 3. Определить передаточное отношение и разработать кинематическую схему передаточного механизма. 4. Рассчитать элементы передаточного механизма. 5. Разработать компоновочные чертежи передаточного и несущего механизмов и механизма вращения в целом. 6. Рассчитать кинематические цепи связи передаточного и несущего механизмов. 7. Разработать конструкцию механизма вращения. 8. Провести проверочные расчеты жесткости механизма вращения и правильности выбора привода. Кинематика механизмов вращения существенно зависит от типа применяемого привода. Применение гидропривода, как правило, не требует реализации большого передаточного отношения, так как удельные усилия, развиваемые гидроприводом, значительно превышают усилия электропривода. Для механизмов, использующих гидропривод в виде гидроцилиндров, возникает необходимость преобразования прямолинейного движения во вращательное. При использовании электропривода требуется в механизмах вращения реализовывать передаточные отношения порядка 80 . 150. Жесткие требования к погрешности позиционирования (для роботов среднего класса ![]() = 0,2 .0,5 мм) ставят задачу обеспечения безлюфтовости привода и высокой жесткости несущего узла механизма. Имеются конструкции, у которых двигатель установлен наповоротной платформе. Такая компоновка обеспечивает лучшийдоступ к зубчато-ременной передаче. Недостатками такойкомпоновки являются увеличение массы движущихся частейинеобходимость монтажа подвижного кабеля к приводному двигателю.
= 0,2 .0,5 мм) ставят задачу обеспечения безлюфтовости привода и высокой жесткости несущего узла механизма. Имеются конструкции, у которых двигатель установлен наповоротной платформе. Такая компоновка обеспечивает лучшийдоступ к зубчато-ременной передаче. Недостатками такойкомпоновки являются увеличение массы движущихся частейинеобходимость монтажа подвижного кабеля к приводному двигателю.
Конструкция механизмов прямолинейного перемещения зависит от применяемого привода и действия на привод сил инерции от массы перемещаемых узлов. В случае применения гидропривода, как правило, выходное звено механизма прямолинейного перемещения связано непосредственно со штоком гидроцилиндра без передаточного механизма. В случае применения в качестве привода электродвигателей и гидромоторов между валом электродвигателей и выходным звеном механизма прямолинейного перемещения встраивают передаточный механизм (ПМ), который обеспечивает повышение выходного момента и преобразует вращательное движение привода в поступательное движение выходного звена механизма прямолинейного перемещения. Характерная особенность механизмов прямолинейного перемещения — небольшое передаточное отношение (6 . 15). К ним предъявляются требования безлюфтовости и высокой жесткости базирования выходного звена. Недостатками конструкции являются уменьшение жесткости руки и большой ход цилиндра. Механизм подъема руки может быть с использованием шариковинтовой передачи. Для разгрузки привода от массы руки и каретки с ней связан шток пневмоци-линдра механизма уравновешивания. Люфт выбирается с помощью регулировки полугаек шариковинтовой передачи. Недостатком механизма является малая скорость перемещения, связанная с тем, что промышленностью не освоены винты с углом подъема винтовой линии 20 .450.
3. Организация однопредметной непрерывной-поточной линии: виды, характеристика, основные календарно-плановые нормативы и алгоритм их расчет.