Билеты госэказаменаРефераты >> Технология >> Билеты госэказамена
Подобный подход не всегда эффективен (рационален), т.к. весовые коэффициенты устанавливаются чаще всего произвольно.
Примечание: Задача принятия решений при проектировании систем управления по своей сути является оптимизационной, которая относится либо к однокритериальной, но чаще всего к многокритериальным задачам оптимизации. Наиболее часто используемыми методами оптимизации при проектировании систем управления являются методы линейного и нелинейного программирования, а также поисковые, теоретико-игровые, эвристические и стохастические методы.
------------------------БИЛЕТ 2-------------------------
1. Литейное производство – способ первичного формообразования заготовок.
Основные термины:
Литейная форма - система элементов, образующих рабочую полость, при заливке которой расплавленным металлом, образуется отливка.
Стержень – элемент литейной формы, предназначенный для получения отверстий и полостей.
Модель – это приспособление, при помощи которого в литеной форме получают полость, формой и размерами соответствующей получаемой отливке.
Литниковая система – система каналов в литейной форме, предназначенная для подвода металла в полость формы.
Модельная плита – металлическая или деревянная плита с закрепленными на ней моделями и элементами литниковой системы.
Поверхность разъема – поверхность, по которой разнимается литниковая форма для извлечения модели.
Формовочный уклон – технологические припуски, расположенные на поверхности перпендикулярной плоскости разъема. Предназначены для облегчения извлечения модели из формы.
Литейный радиус – скругление внутренних углов отливки для предотвращения появления трещин в местах сопряжения элементов отливки.
Различают следующие виды литья:
1. Литье в песчано-глинистые формы. Сущность метода:
· Изготовление модели (из дерева, пластмассы, металла и т.д.)
· Изготовление литейной формы по модели
· Извлечением модели
· Заливка литейной формы расплавленным металлом и охлаждение
· Разрушение литейной формы и извлечение отливки
2. Литье под давлением. Сущность метода: расплавленный металл под действием давления заливается в полость металлической пресс-формы.
3. Литье по выплавляемым моделям. Сущность метода: заливка расплавленным металлом литейной формы, которая образована растворением модели.
4. Центробежное литье. Сущность метода заключается в заливке металла во вращающиеся формы.
5. Литье в оболочковые формы. В данном случае литейная форма представляет собой оболочку, изготовляемую из песчано-глинястой смеси, которая пропитана смолой.
6. Литье в кокиль. Кокиль – мет. литейная форма. Бывает вытряхной (без поверхности разъема), а также с горизонтальной и вертикальной плоскостью разъема.
Окончательный выбор литейного производства как способа первичного формообразования заготовок производят на основе экономического расчета.
2. Принципы построения систем программного управления роботов.
С позиции управления робот представляет собой электромеханическую систему, состоящую из многозвенной механической конструкции с приводами взаимного перемещения звеньев и перепрограммируемого устройства управления. Следует различать непрерывное и логическое управление оборудованием.
|
|
|
|
|
|
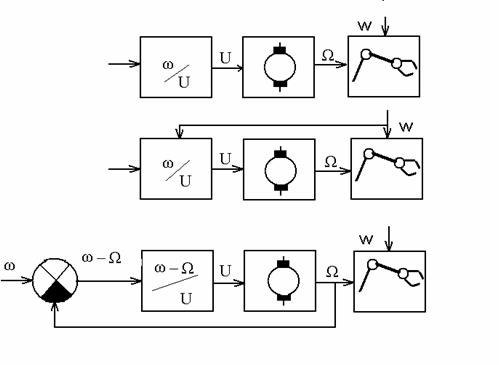
Рис. 2.1. Принципы управления : а- разомкнутое; б- с компенсацией возмущений; в - по отклонению
|

Система управления роботом имеет четыре уровня (рис. 2.2).
Рис. 2.2. Уровни управления роботом : 1- исполнительный; 2- тактический ; 3- стратегический; 4- искусственного интеллекта
Исполнительный уровень представляет собой системы автоматического управления приводами по всем степеням подвижности. Обычно это системы регулирования по отклонению фактического выхода от заданного. Это единственный уровень, на котором реализуется непрерывное управление.