ТВ и эволюция нетерпимостиРефераты >> Журналистика >> ТВ и эволюция нетерпимости
Vнач=0 – начальная скорость подъема;
 |
Путь, проходимый при разгоне Sр1:
b=0.5 м/с2 – допустимое замедление;
 |
Время торможения tТ1:
 |
 |
L=0.04 м – путь перемещения механизма подъема по техническим требованиям грузозахватного устройства.
 |
 |
Расчетный путь перемещения S:
 |
h=0.4 м – высота ячейки.
 |
Время работы на участке с установившейся скоростью tу1:
 |
 |
Время работы на участке с пониженной скоростью tу3:
 |
 |
Путь, проходимый на отрезке торможения SТ3:
 |
 |
Время паузы t0:
Тахограмма механизма представлена на рис.2.
V
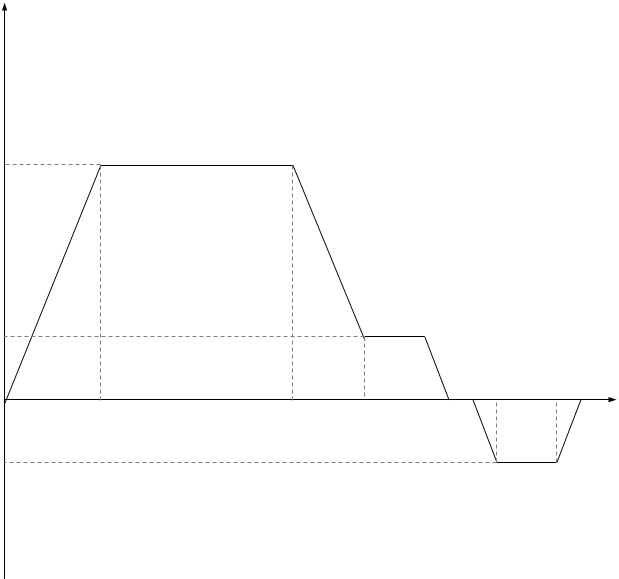
VN
![]() Vпон1
Vпон1
t0 tр2 tу3 tт3 t
tр1 tу1 tт1 tу2 tт2
Vпон2
Рис. 2. Тахограмма механизма
3. ФОРМИРОАНИЕ ТРЕБОВАНИЙ К ЭЛЕКТРОПРИВОДУ
1.Электропривод работает в повторно-кратковременном режиме;
2. Диапазон регулирования скорости до 10:1 (в зависимости от требуемой точности останова);
3. Необходимость точного позиционирования электропривода в фиксированных точках;
4. Должна быть обеспечена возможность работы и регулирования скорости электропривода при активном моменте статической нагрузки;
5. Привод должен быть реверсивным.
4. ВЫБОР ТИПА ЭЛЕКТРОПРИВОДА
Конструкция кранов в основном определяется их назначением и спецификой технологического процесса, но ряд узлов, например механизм подъема и перемещения, выполняется однотипными для кранов различных видов. Поэтому имеется много общего в вопросах выбора и эксплуатации электрооборудования кранов.
Электрооборудование кранов работает, как правило, в тяжелых условиях: повышенная загазованность и запыленность, высокая влажность, влияние химических реагентов. В связи с этим оно должно выбираться в соответствующем конструктивном исполнении, оборудование кранов стандартизировано.
К электрооборудованию кранов предъявляются следующие требования: обеспечение высокой производительности, надежности работы, безопасность обслуживания, простота эксплуатации и ремонта.
Режим работы крановых механизмов – важный фактор при выборе мощности приводных электродвигателей, он характеризуется следующими показателями: относительная продолжительность включения, среднесуточное время работы, число включений за 1 час работы электродвигателя, коэффициент переменности нагрузки.
В механизмах кранов-штабелеров находят применение крановые электродвигатели трехфазного переменного тока (асинхронные) и постоянного тока. Они работают в повторно-кратковременном режиме при широком регулировании частоты вращения, причем их работа сопровождается значительными перегрузками, частыми пусками, реверсами и торможениями.
Кроме того, электродвигатели крановых механизмов работают в условиях повышенной вибрации. В связи с этим по своим технико-экономическим показателям и характеристикам крановые электродвигатели отличаются от электродвигателей общепромышленного исполнения.
Наибольшее применение для крановых механизмов получили крановые электродвигатели серии MTKF, асинхронные с короткозамкнутым ротором, обеспечивающие высокий пусковой и номинальный моменты, регулирование скорости в широких пределах и плавный пуск [7].